 |
VOOZH | about |
|
VOOZH | about |
A high-fidelity Genesis simulation server that communicates with the Franka robot's network protocol, enabling seamless switching between simulation and hardware.
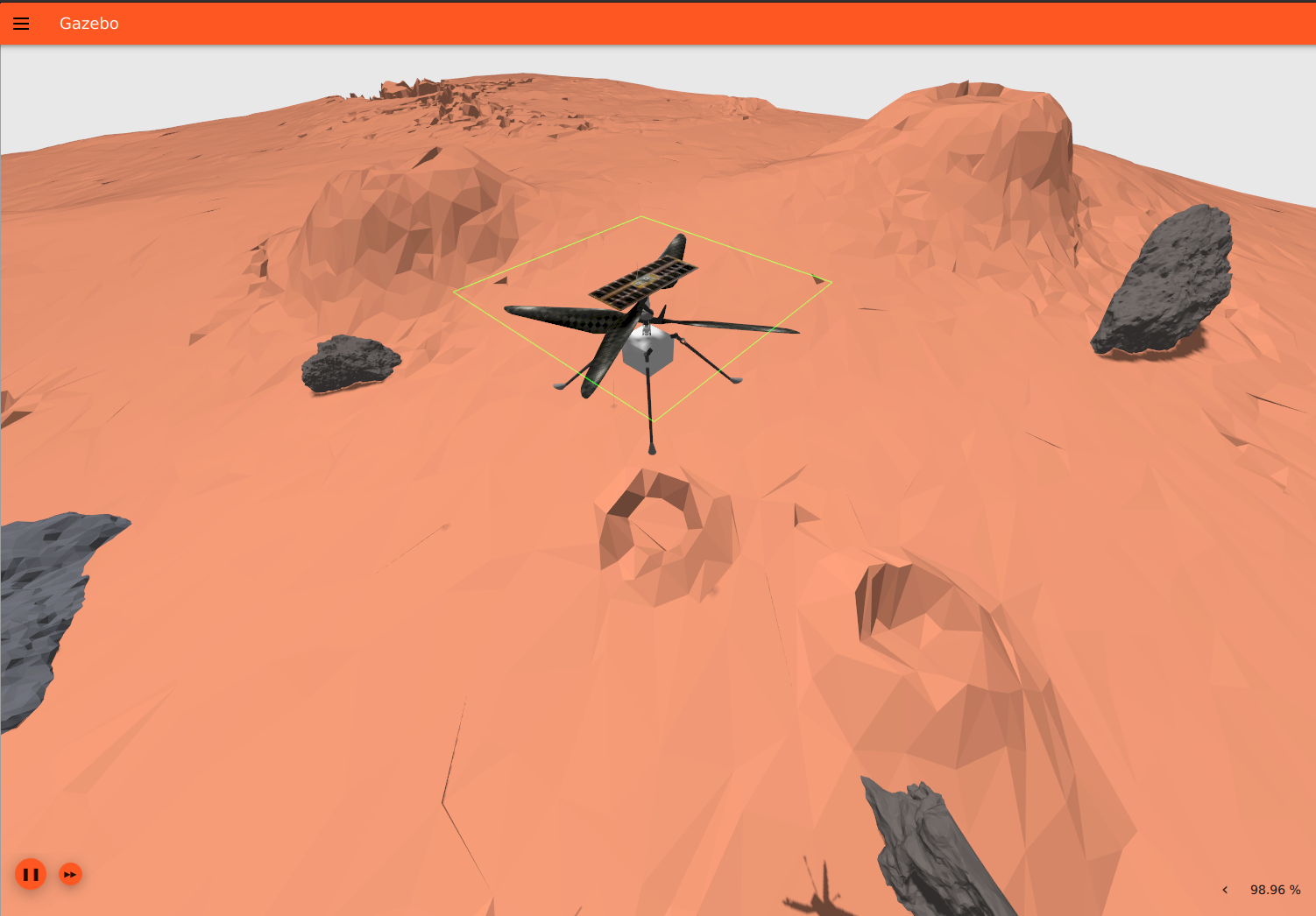
Developed Ingenuity Mars Helicopter simulation in ROS 2 Gazebo, implementing collective and cyclic control systems. Secured 5th place with $1,250 prize money.
Led development of industry-standard robotics control framework, achieving widespread adoption in both research and industry applications.
Engineered a general robotics grasping model deep RL achieving 99% accuracy on object picking tasks, open-sourced with significant community impact.
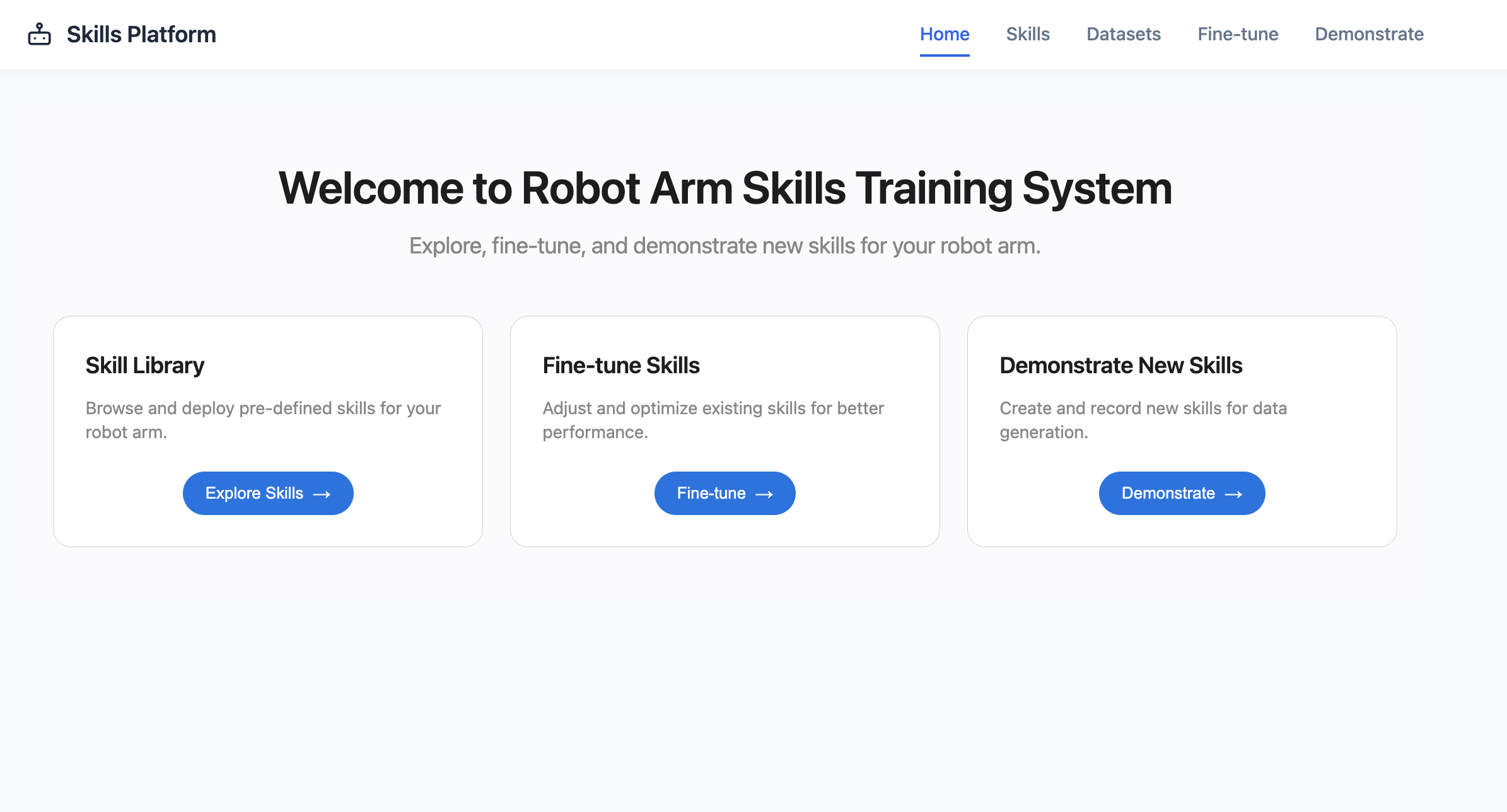
Represents my vision for future robotics programming. Enabling users to demostrate skills to a robot then fine-tune and deploy them.
Engineered complete ROS 2 hardware interface and MoveIt packages for an open-source 3D printed robot, making robotics more accessible through cost-effective solutions.
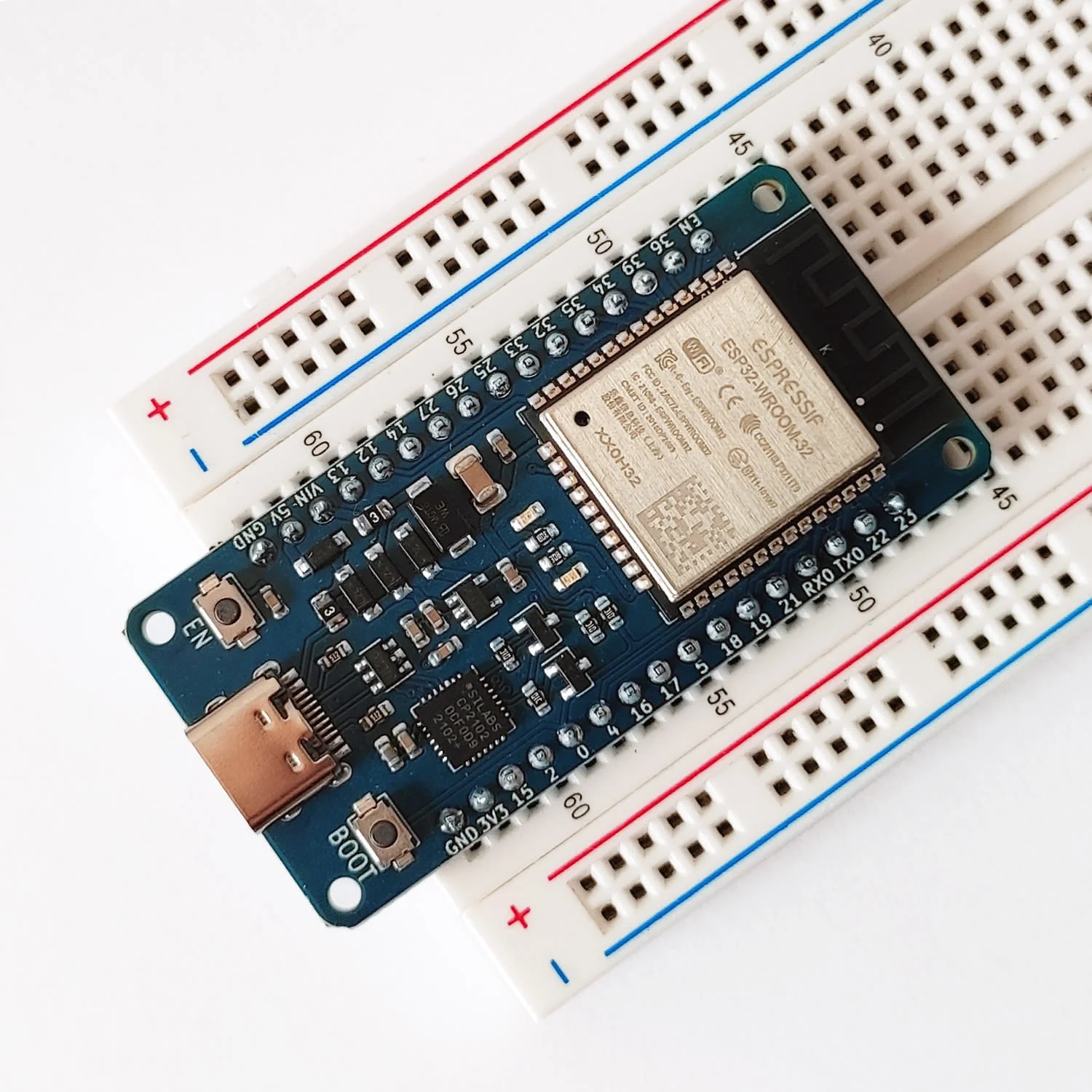
Developed embedded microROS 2 interface for ESP32 board to control multiple servo motors with real-time capabilities.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}