 |
VOOZH | about |
|
VOOZH | about |
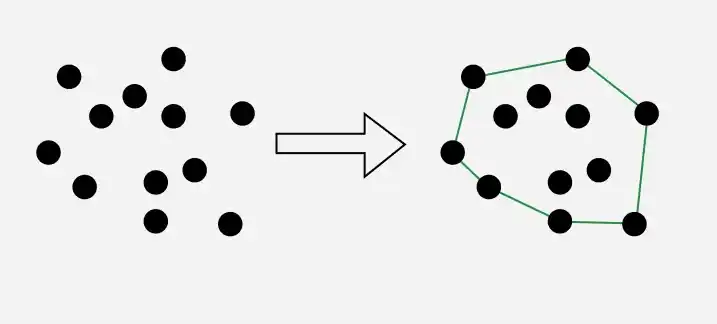
The Convex Hull Algorithm is used to find the convex hull of a set of points in computational geometry. The convex hull is the smallest convex set that encloses all the points, forming a convex polygon. This algorithm is important in various applications such as image processing, route planning, and object modeling.
The convex hull of a set of points in a Euclidean space is the smallest convex polygon that encloses all of the points. In two dimensions (2D), the convex hull is a convex polygon, and in three dimensions (3D), it is a convex polyhedron.
The below image shows a 2-D convex polygon:
Problem Statement: Given an array of coordinates {x, y} on a 2-D plain, your task is to print the set of coordinates that form the convex hull.
Examples:
Input: points[] = {(0, 0), (0, 4), (-4, 0), (5, 0), (0, -6), (1, 0)};
Output: (-4, 0), (5, 0), (0, -6), (0, 4)Input: points_list = {{1, 2}, {3, 1}, {5, 6}}
Output: {{1, 2}, {3, 1}, {5, 6}}
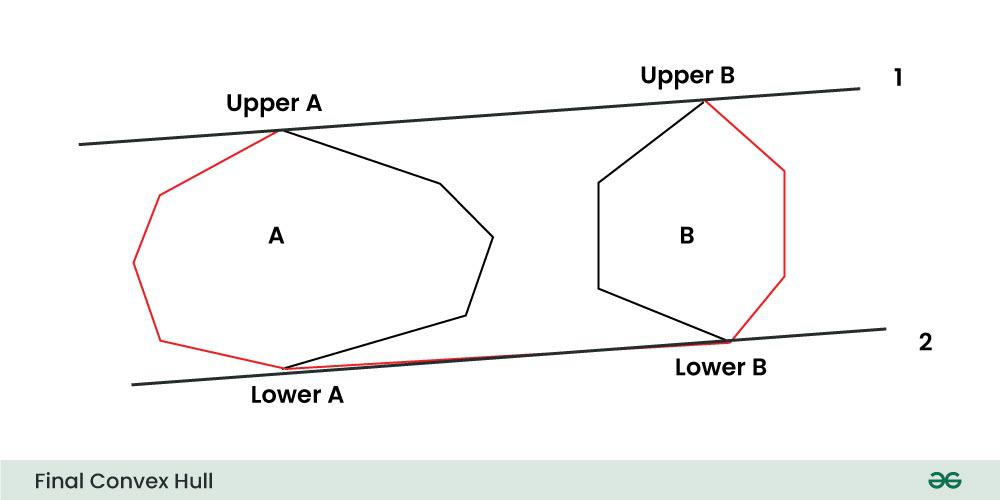
Pre-requisite:Tangents between two convex polygons
Algorithm: Given the set of points for which we have to find the convex hull. Suppose we know the convex hull of the left half points and the right half points, then the problem now is to merge these two convex hulls and determine the convex hull for the complete set.
Pre-requisite:How to check if two given line segments intersect?
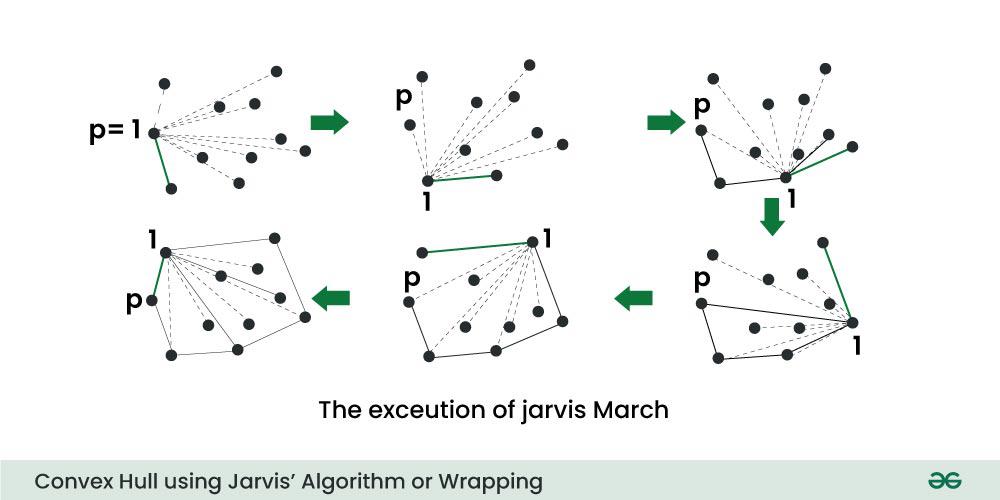
The idea of Jarvis’s Algorithm is simple, we start from the leftmost point (or point with minimum x coordinate value) and we keep wrapping points in counterclockwise direction.
The big question is, given a point p as current point, how to find the next point in output?
The idea is to use orientation() here. Next point is selected as the point that beats all other points at counterclockwise orientation, i.e., next point is q if for any other point r, we have “orientation(p, q, r) = counterclockwise”.
:
👁 Convex-Hull-using-Jarvis-Algorithm-or-Wrapping
Pre-requisite: How to check if two given line segments intersect?
Algorithm: Let points[0..n-1] be the input array. Then the algorithm can be divided into two phases:
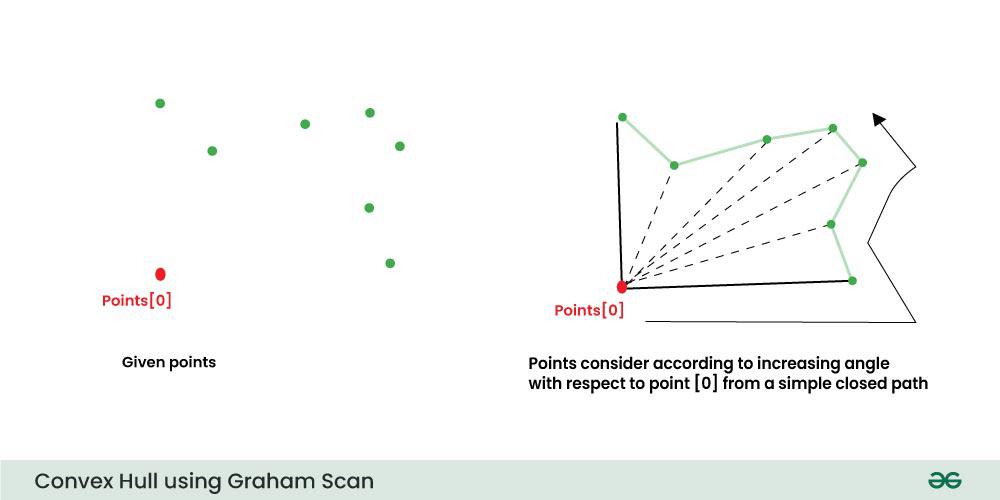
Phase 1 (Sort points): We first find the bottom-most point. The idea is to pre-process points be sorting them with respect to the bottom-most point. Once the points are sorted, they form a simple closed path (See the following diagram).
👁 Convex-Hull-using-Graham-Scan-1
What should be the sorting criteria? computation of actual angles would be inefficient since trigonometric functions are not simple to evaluate. The idea is to use the orientation to compare angles without actually computing them (See the compare() function below)
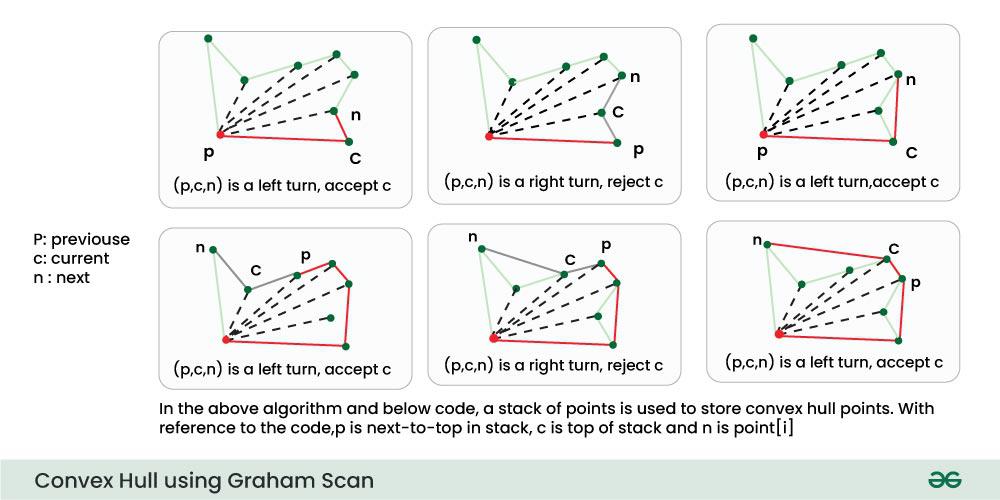
Once we have the closed path, the next step is to traverse the path and remove concave points on this path. How to decide which point to remove and which to keep? Again, orientation helps here. The first two points in sorted array are always part of Convex Hull. For remaining points, we keep track of recent three points, and find the angle formed by them. Let the three points be prev(p), curr(c) and next(n). If orientation of these points (considering them in same order) is not counterclockwise, we discard c, otherwise we keep it. Following diagram shows step by step process of this phase.
👁 Convex-Hull-using-Graham-Scan-2
Monotone chain algorithm constructs the convex hull in O(n * log(n)) time. We have to sort the points first and then calculate the upper and lower hulls in O(n) time. The points will be sorted with respect to x-coordinates (with respect to y-coordinates in case of a tie in x-coordinates), we will then find the left most point and then try to rotate in clockwise direction and find the next point and then repeat the step until we reach the rightmost point and then again rotate in the clockwise direction and find the lower hull.
The QuickHull algorithm is a Divide and Conquer algorithm similar to QuickSort. Let a[0…n-1] be the input array of points. Following are the steps for finding the convex hull of these points.
Algorithm:
Convex Hull Algorithm | Time Complexity |
|---|---|
O(N*log N) | |
O(N2) | |
O(N*logN) | |
O(N*log(N)) | |
The analysis is similar to Quick Sort. On average, we get time complexity as O(N*log N), but in worst case, it can become O(N2) |
Dynamic Convex hull | Adding Points to an Existing Convex Hull
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}