 |
VOOZH | about |
|
VOOZH | about |
Given n line segments represented as a 3D vector points[][][], where each line segment i is defined by its endpoints stored in points[i][0] and points[i][1] (each containing 2 integers), your task is to determine if any two of these line segments intersect and find the number of intersection points.
Examples:
Input: points[][][] = [ [ [1, 5], [4, 5] ],
[ [2, 5], [10, 1] ],
[ [3, 2], [10, 3] ],
[ [6, 4], [9, 4] ],
[ [7, 1], [8, 1] ] ]
Output: 2
Explanation: Lines [ [1, 5], [4, 5] ] intersects with [ [2, 5], [10, 1] ] which further intersects with [ [3, 2], [10, 3] ]. Thus there are two intersection points.
A naive solution to solve this problem is to check every pair of lines and check if the pair intersects or not. We can check two line segments in O(1) time. Therefore, this approach takes O(n2).
The idea is to use a sweep line method that processes the endpoints of the line segments from left to right, dynamically maintaining a set of segments currently "active" as the sweep line moves. With this approach, we only check for intersections between line segments that are close to each other in the vertical ordering, thus ensuring we handle the problem in a methodical and efficient manner. To manage the active segments, a self-balancing binary search tree (like an AVL or Red-Black Tree) or a similar data structure is used; this allows us to quickly insert new segments, remove segments once their right endpoint is passed, and find the segments immediately above and below a given segment.
Below is given the step-by-step approach to solve the problem:
Pseudocode:
Example:
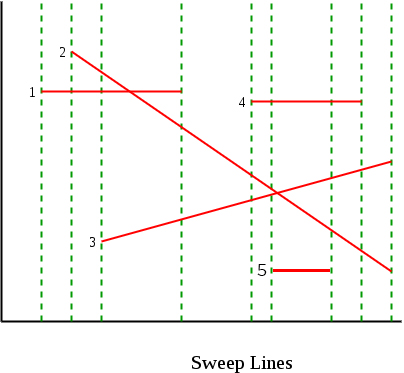
There are 5 line segments 1, 2, 3, 4 and 5 and the dotted green lines show sweep lines.
Following are steps followed by the algorithm
- Process the left endpoint of segment 1.
- Insert segment 1 into the BST.
- The BST now contains: 1
- No intersection is found.
- Process the left endpoint of segment 2
- Check for intersection between segment 2 and segment 1.
- Insert segment 2 into the BST.
- Intersection of 1 and 2 is detected. (In the pseudocode, we would return here, but we continue in this example to find all possible intersections.)
- The BST now contains: 1, 2
- Process the left endpoint of segment 3
- Check for intersection between segment 3 and segment 1.
- No intersection is found.
- Insert segment 3 into the BST.
- The BST now contains: 1, 2, 3
- Process the right endpoint of segment 1
- Remove segment 1 from the BST.
- Check for intersection between segments 2 and 3.
- Intersection of 2 and 3 is found and reported.
- The BST now contains: 2, 3
- Process the left endpoint of segment 4
- Check for intersections between segment 4 and existing segments (2 and 3).
- No intersection is found.
- Insert segment 4 into the BST.
- The BST now contains: 2, 4, 3
- Process the left endpoint of segment 5
- Check for intersection between segment 5 and segment 3.
- No intersection is found.
- Insert segment 5 into the BST.
- The BST now contains: 2, 4, 3, 5
- Process the right endpoint of segment 5
- Remove segment 5 from the BST.
- The BST now contains: 2, 4, 3.
- Process the right endpoint of segment 4
- Remove segment 4 from the BST.
- The BST now contains: 2, 3
- Check for intersection between segments 2 and 3.
- Intersection of 2 and 3 is reported again. (Additional logic might be added to avoid duplicating the same intersection.)
- The BST still contains: 2, 3
- Process the right endpoints of segments 2 and 3
- Remove segments 2 and 3 from the BST.
- The BST becomes empty.
After these steps, all endpoints have been processed, and all intersections have been identified (with duplicates possibly reported depending on the implementation details).
Line: 2 3 Line: 1 2 2
Note: The above code does not handle cases when segments share end points (Same starting points or same ending points or same starting and ending points) because we handle all points in the same way without considering the line segment number. We have done that way to keep the code simple. The Event class currently compares events based only on y and x, and does not distinguish between segments with the same start point. To handle the common end points, we need to differentiate events more clearly in the comparator to avoid ambiguity between events with the same coordinates.
Time Complexity: O(n * log n), initially, sorting the points requires O(n log n) time. Next, each point is processed in O(log n) time, so processing all 2n points takes O(2n log n) time. This simplifies to an overall time complexity of O(n log n).
Space Complexity: O(n)
{kind=link}
{kind=link}