Mason's Gain Formula, also known as Mason's Rule or the Signal Flow Graph Method, is a technique used in control systems and electrical engineering. It provides a systematic way to analyze the transfer function of a linear time-invariant (LTI) system, especially those with multiple feedback loops and complex interconnections.
Mason’s Gain Formula (MGF) helps determine the transfer function of a linear signal flow graph.
Total gain represents the relationship between input variables and output variables in a system.
Signal labeling allows formation of equations that describe relationships among different signals.
Solving those equations expresses the output signal in terms of the input signal.
Mason's Gain Formula
Mason's gain formula for the determination of the overall system gain is given by:
where,
N: total number of forward paths
Pi : gain of the ith forward path
∆: determinant of the graph
∆i : path-factor for the ith path
The determinant of the graph (∆) and the path-factor for the ith path (∆i) are defined as follows:
∆i : 1 - (loop gain which does not touch the forward path)
∆: 1 - Σ(all individual loop gains) + Σ(gain product of all possible combinations of two non-touching loops) - Σ(gain product of all possible combinations of three non-touching loops) + ....
Important Terminologies of Mason's Gain Formula
Path: Traversal along connected branches where no node appears more than once.
Forward Path: Traversal from the input node to the output node.
Forward Path Gain: Product of all branch gains encountered along a forward path.
Loop: Closed path that begins and ends at the same node.
Non Touching Loops: Loops that do not share any common node.
Loop Gain: Product of branch gains along a closed loop.
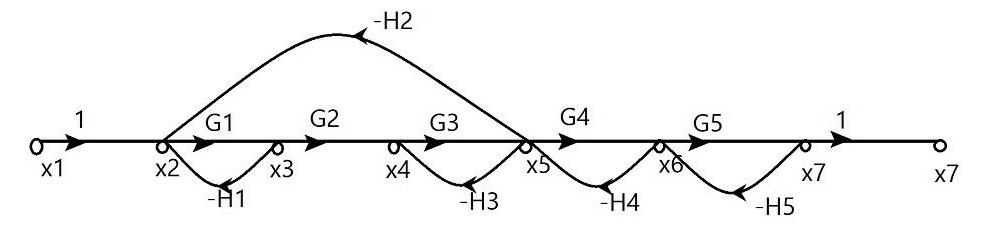
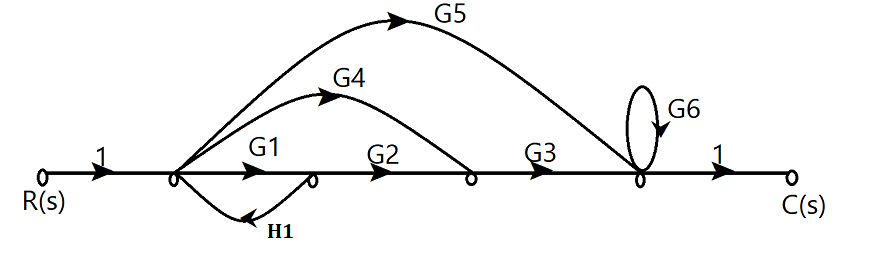
Let us consider a signal flow graph for understanding the above elements:
∆1 = ∆2 = ∆3 = 1 (since all loops are touching P1,P2 &P3)
∆ = 1 - (G1H1+G6) + G1G6H1
Transfer Function:
Advantages & Disadvantages
Advantages
Simplicity: A systematic procedure helps in calculating overall gain of a complex control system.
Comprehensive: Analysis remains possible even when several feedback loops exist in a system.
Versatility: Usage remains suitable for linear time-invariant control systems.
Visualization: Identification of different paths and loops becomes easier, which improves understanding of system behaviour.
Disadvantages
Complexity for Large Systems: Large numbers of loops and paths increase calculation difficulty and time.
Limited to Linear Systems:Application mainly focuses on linear time-invariant systems and does not directly support nonlinear or time-varying systems.
Assumption of Non Touching Loops: Analysis assumes loops do not intersect, which may not match some practical systems.
Limited Practical Insight: Calculation focuses on overall gain and may not clearly explain stability or dynamic characteristics required in some applications.
Applications
Stability Analysis: Calculation of poles and zeros of the overall transfer function helps in studying system stability.
Closed-Loop Systems: Evaluation of feedback effects helps in understanding overall system performance.
Transient and Steady-State Response: Study of system behaviour for transient conditions and steady-state inputs becomes easier.
Filter Design: Analysis of frequency response supports the design and development of filters.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}