 |
VOOZH | about |
|
VOOZH | about |
A controller is a combination of a hardware device and a software program in a control system that manages the flow of data from one entity to another and generates the required output. There are several techniques or algorithms that are used in an automation system to control a system. One of the types that is used in a PID controller is the Proportional controller or P-only controller. This is the simplest closed-loop feedback control.
In engineering and process control systems, a proportional controller produces an output that is proportional to the error signal. Error is defined as the difference between the desired value (Set Point, SP) and the measured value (Process Variable, PV).
A proportional controller continuously compares SP and PV and adjusts the system output to minimize the error. Faster response is achieved compared to other controllers. The exact setpoint is not always reached due to steady-state error.
The proportional controller initially compares the Set Point (SP) value with the actual Process Variable (PV) value. Following this, the system's feedback loop becomes operational, continuously monitoring the system's output and comparing it to the desired output. As necessary, the inputs are modified to minimize the disparity between the output and the desired value.
Subsequently, the controller generates an error signal, which is then multiplied by a proportional gain factor. This multiplication yields an output that is proportionate to the error signal and endeavors to bring the system closer to the desired value. The feedback loop plays a pivotal role in ensuring the system's ability to adapt to changing conditions and maintain a stable output, even in the face of internal or external disturbances. This text is free from plagiarism.
This is a constant tuning parameter of P controller which is need to adjust to control the system response. In a proportional controller it is used as proportional gain or . This Kp value is directly proportional to the changes in error signal. High value means the the controller will react more strongly and faster in changes of error signal. And low value means the controller will react slowly in changes of error signal.
Controller output means the signal generated by the controller. It is denoted by 'U' . According to this output the system will take required action to get more closer answer of the set point.
Proportional controller produces output which is proportional to the error signal(E). So at a time 't' the equation can be written as ,
-----------(i)
Taking Laplace in both side of equation no (i),
Further this equation can be written as,
Therefore U(s) is the Laplace transform of controller output U(t), E(s) is the Laplace transform of error signal E(t) and is the gain factor or proportional gain.
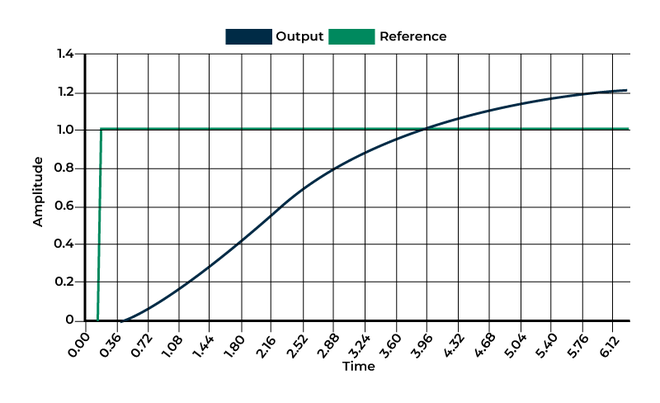
Tunning refers the adjustment of value to get most efficient output of process variable. The choice of value effects the controller in terms of stability, speed overshot etc. Let's consider a simple example of tuning process.
Suppose,
X-axis represents the time, and Y-axis represents the difference between setpoint and process variable.
When the value is 0.5,
Lets again increase value to 1.2,
Again increase the value to 1.3,
This process will be continued until to get the most perfect value of and continue monitoring the system for any deviations and adjust accordingly.
P only controller or proportional controller is a closed loop feedback control system, where the controller adjust its output based on the difference between setpoint and process variable. So here are some examples of P only controller along with explanation and diagram.
Adaptive cruise control is like a smart driving helper in your car. It uses proportional control to adjust how much gas the car gets. This helps the car handle different situations, like going up or down hills and staying a safe distance from the cars in front. If you get too close to any car, you can apply break to avoid any accidents and continue a smooth drive.
Proportional control often used in industrial automation such as speed control, pressure control, flow control, PH control, level control, position control. But their are some major use of P controller, which described below.
Setpoint [P controller/temperature control] heating element
Setpoint= [P controller] = value of water flow
Setpoint = [P controller] = Control valve
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}