
More than 5 years have passed since last update.
{kind=link}
Dronecode - QGroundControlのカスタマイズ開発
1
Last updated at Posted at 2020-07-28
ドローンの自律飛行を実現するには、DronecodeとMAVSDKを試してみます。
目次
動作環境
- Ubuntu 18.04
- ROS Melodic
QGroundControlの開発環境の構築
QTのインストール
QGroundControlがQTのヘッダファイルをアクセスするため、QTをインストールします。
-
Qt Online Installerをダウロードします
-
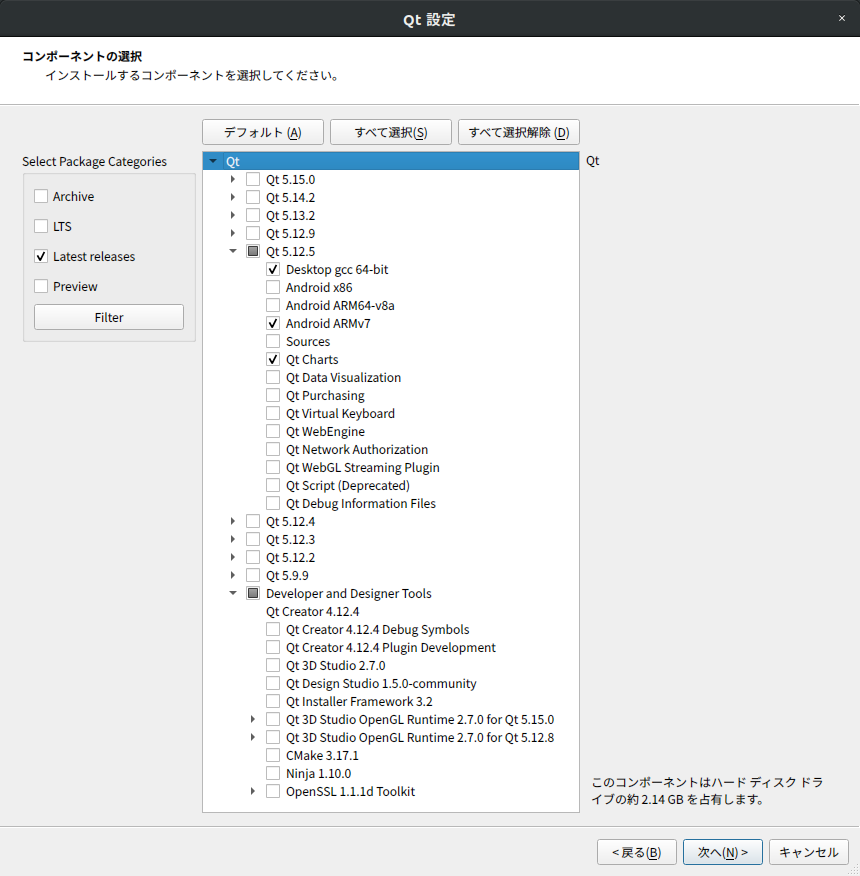
インストールには、コンポーネント「5.12.5」を指定します
「Desktop gcc 64-bit」、「Qt Charts」、「Android ARMv7 (to build Android)」を選択 -
Packagesをインストール
sudo apt-get install speech-dispatcher libudev-dev libsdl2-dev
{kind=link}
{kind=link}
ソースコードの取得
git clone https://github.com/mavlink/qgroundcontrol.git --recursive
git submodule update
Qt Creatorでコンパイル
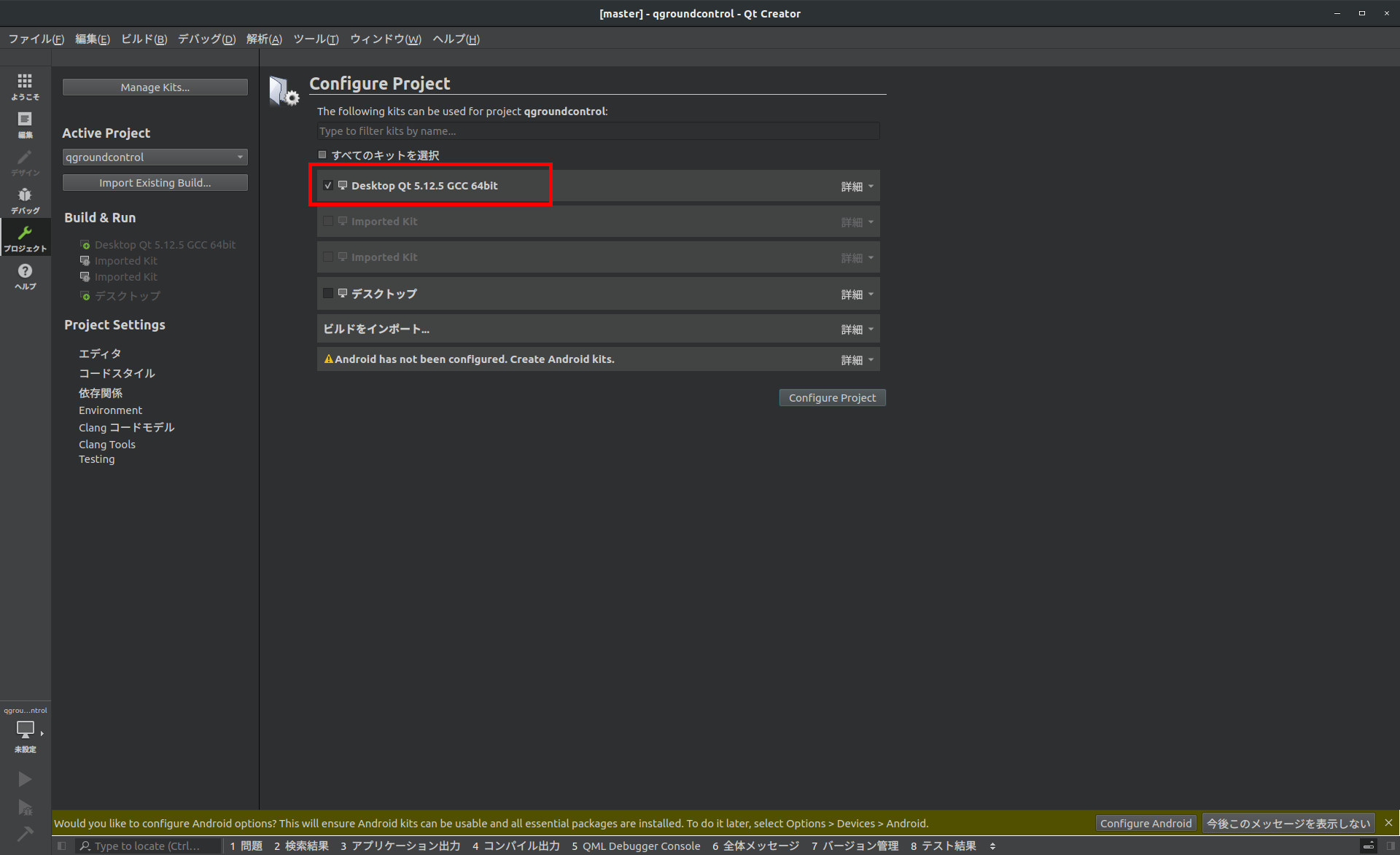
- Qt Creatorを起動、「qgroundcontrol.pro project」を開く
- 「Desktop Qt 5.12.5 GCC 64bit」kitを選択
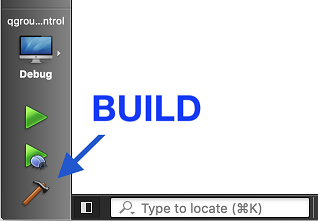
- ビルド(hammerアイコン)(20分かかる)
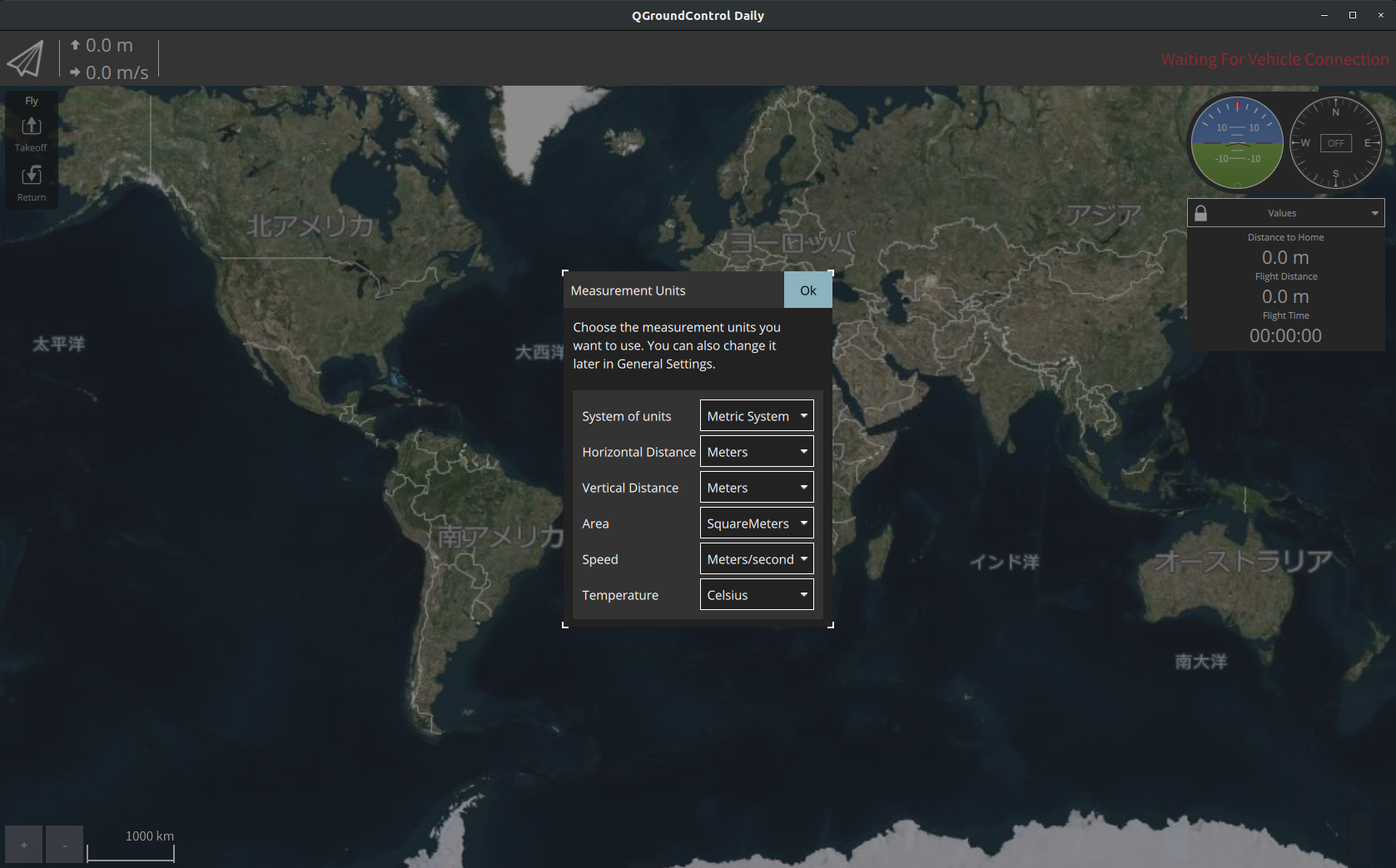
- QGroundControlを実行(playアイコン)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Register as a new user and use Qiita more conveniently
- You get articles that match your needs
- You can efficiently read back useful information
- You can use dark theme