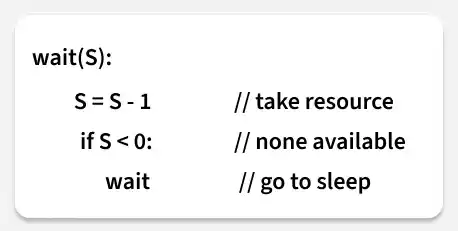
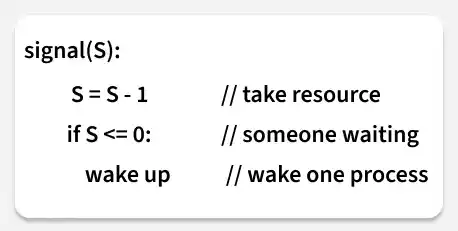
A semaphore is a synchronization tool used in operating systems to manage access to shared resources in a multi-process or multi-threaded environment. It is an integer variable that controls process execution using atomic operations like wait() and signal(). Semaphores help prevent race conditions and ensure proper coordination between processes.
Controls entry into the critical section.
Maintains a counter representing available resources.
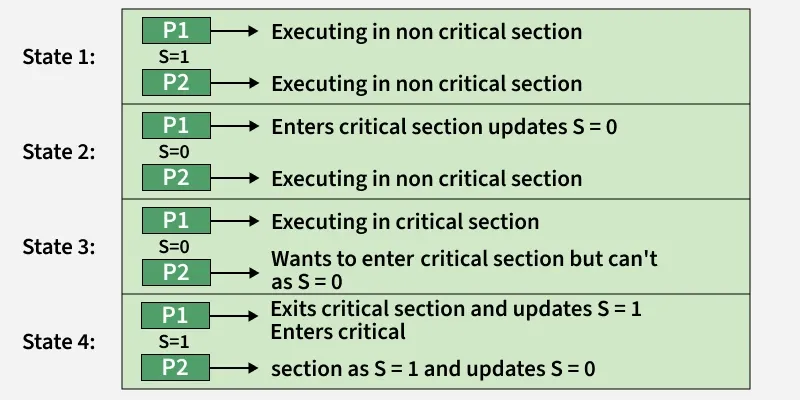
Example: Let’s consider two processes P1 and P2 sharing a semaphore S, initialized to 1:
State 1: Both processes are in their non-critical sections, and S = 1.
State 2: P1 enters the critical section. It performs wait(S), so S = 0. P2 continues in the non-critical section.
State 3: If P2 now wants to enter, it cannot proceed since S = 0. It must wait until S > 0.
State 4: When P1 finishes, it performs signal(S), making S = 1. Now P2 can enter its critical section and again sets S = 0.
This mechanism guarantees mutual exclusion, ensuring that only one process can access the shared resource at a time, see the image below for reference:
Mutual Exclusion: Semaphore ensures that only one process accesses a shared resource at a time.
Process Synchronization: Semaphore coordinates the execution order of multiple processes.
Resource Management: Limits access to a finite set of resources, like printers, devices, etc.
Reader-Writer Problem: Allows multiple readers but restricts the writers until no reader is present.
Avoiding Deadlocks: Prevents deadlocks by controlling the order of allocation of resources.
Types of Semaphores
Semaphores are mainly of two Types:
1. Counting Semaphore
A counting semaphore can have values ranging from 0 to any positive integer. It is used when multiple instances of a resource are available and need to be managed.
Value ranges from 0 to n.
Manages multiple resource instances.
Controls access to limited resources.
Example: Managing access to 5 printers or 3 database connections.
2. Binary Semaphore
A binary semaphore has only two possible values: 0 and 1. It is mainly used for mutual exclusion, ensuring that only one process enters the critical section at a time.
Value is either 0 or 1.
Used for mutual exclusion.
Similar to a mutex lock.
Managing access to a single critical section
Limitations of Semaphores
Priority Inversion: A low-priority process holding a semaphore can block a high-priority one.
Deadlock: Processes may wait on each other’s semaphores in a cycle, causing indefinite blocking.
Complex to Manage: The OS must carefully track wait and signal calls; misuse can cause errors.
Busy Waiting: In basic implementations, processes may keep checking the semaphore value, wasting CPU time.

{kind=link}
{kind=link}
{kind=link}
{kind=link}