
| Cálculo |
|---|
|
Cálculo especializado |
No cálculo, a derivada em um ponto de uma função 👁 {\displaystyle y=f(x)}
representa a taxa de variação instantânea de 👁 {\displaystyle y}
em relação a 👁 {\displaystyle x}
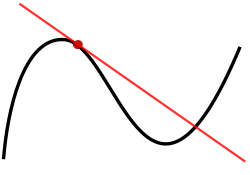
neste ponto. Um exemplo típico é a função velocidade que representa a taxa de variação (derivada) da função espaço. Do mesmo modo, a função aceleração é a derivada da função velocidade. Geometricamente, a derivada no ponto 👁 {\displaystyle x=a}
de 👁 {\displaystyle y=f(x)}
representa a inclinação da reta tangente ao gráfico desta função no ponto 👁 {\displaystyle (a,~f(a))}
.[1][2] A função que a cada ponto 👁 {\displaystyle x}
associa a derivada neste ponto de 👁 {\displaystyle f(x)}
é chamada de função derivada de f(x).
{kind=link}
{kind=link}
é a tangente do ângulo que a reta tangente à curva faz em relação ao eixo das abscissas. A reta é sempre tangente à curva azul; a tangente do ângulo que ela faz com o eixo das abscissas é a derivada. Note-se que a derivada é positiva quando verde, negativa quando vermelha, e zero quando preta.
Notação
[editar | editar código]Duas distintas notações são comumente utilizadas para a derivada, o resultante de Leibniz e o outro a partir de Joseph Louis Lagrange.
Na notação de Leibniz, uma mudança infinitesimal em x é denotada por dx, e a derivada de y em relação a x é escrito 👁 {\displaystyle {\frac {\mathrm {d} y}{\mathrm {d} x}}\,\!}
.
sugerindo que a razão de duas quantidades infinitesimais (A expressão acima é lido como "a derivada de y em relação a x", "dy por dx", ou "dy sobre dx". A forma oral dydx é usado frequentemente em tom de conversa, embora possa levar à confusão).
Na notação de Lagrange, a derivada em relação a x de uma função F(x) é denotada f'(x) ou fx'(x), em caso de ambiguidade da variável implicada pela derivação. A notação de Lagrange é por vezes incorretamente atribuída a Newton.
Definição
[editar | editar código].gif){kind=link}
{kind=link}
Seja 👁 {\displaystyle I}
um intervalo aberto não-vazio e seja 👁 {\displaystyle f:I\to \mathbb {R} }
, 👁 {\displaystyle y=f(x)}
, uma função de 👁 {\displaystyle I}
em 👁 {\displaystyle \mathbb {R} }
. Diz-se que função 👁 {\displaystyle f(x)}
é derivável no ponto 👁 {\displaystyle a\in I}
se existir o seguinte limite:[3]
Se for esse o caso, o número real 👁 {\displaystyle f'(a)}
é chamado de derivada da função 👁 {\displaystyle f}
no ponto 👁 {\displaystyle a}
. Notações equivalentes são:
Equivalentemente, escrevemos:
👁 {\displaystyle f'(a)=\lim _{h\to 0}{\frac {f(a+h)-f(a)}{h}}}
o que é obtido fazendo 👁 {\displaystyle h=x-a}
no limite acima. Desta forma, define-se a função derivada de 👁 {\displaystyle f(x)}
por:
👁 {\displaystyle f'(x)=\lim _{h\to 0}{\frac {f(x+h)-f(x)}{h}}}
para todo 👁 {\displaystyle x}
para o qual este limite existe.
Uma função é dita derivável (ou diferenciável) quando sua derivada existe em cada ponto do seu domínio.
| Segundo esta definição, a derivada de uma função de uma variável é definida como um processo de limite. Considera-se a inclinação da secante, quando os dois pontos de intersecção com o gráfico de f convergem para um mesmo ponto. No limite, a inclinação da secante é igual à da tangente. |
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Seja f uma função real definida em uma vizinhança aberta de um número real a.
Na geometria clássica, a linha tangente ao gráfico da função f em a foi a única linha que passou pelo ponto (a, f(a)) que não encontrou o gráfico de f transversalmente, significando que a linha não passou diretamente pelo gráfico.
O declive da secante ao gráfico de f, na imagem acima, que passa pelos pontos (x,f(x)) e (x+h,f(x+h)) é dado pelo quociente de Newton:
{kind=link}
Uma definição alternativa é: a função f é derivável em a se existir uma função φa de I em R contínua em a tal que
Então define-se a derivada de f em a como sendo φa(a).
Funções com valores em R👁 {\displaystyle ^{n}}
Se 👁 {\displaystyle I}
for um intervalo de 👁 {\displaystyle \mathbb {R} }
com mais do que um ponto e se 👁 {\displaystyle f}
for uma função de 👁 {\displaystyle I}
em 👁 {\displaystyle \mathbb {R} ^{n}}
, para algum número natural 👁 {\displaystyle n}
, as definições anteriores continuam a fazer sentido. Assim, por exemplo a função
- 👁 {\displaystyle {\begin{array}{rccc}f\colon &\mathbb {R} &\longrightarrow &\mathbb {R} ^{2}\\&x&\mapsto &(\cos(x),\operatorname {sen} (x))\end{array}}}
(ou seja: uma função que a cada x do domínio em 👁 {\displaystyle \mathbb {R} }
responde com uma coordenada no contradomínio em 👁 {\displaystyle \mathbb {R} ^{n}}
. Esta coordenada é 👁 {\displaystyle (\cos(x),\operatorname {sen} (x))}
.
é derivável e
{kind=link}
{kind=link}
De fato, as propriedades acima descritas para o caso real continuam válidas, exceto, naturalmente, as que dizem respeito à monotonia de funções.
Diferenciabilidade
[editar | editar código]Derivabilidade em um ponto
[editar | editar código]- Seja 👁 {\displaystyle I}
um intervalo de R com mais do que um ponto, seja 👁 {\displaystyle a}
∈👁 {\displaystyle I}
e seja 👁 {\displaystyle f}
uma função de 👁 {\displaystyle I}
em R derivável em 👁 {\displaystyle a}
. Então 👁 {\displaystyle f}
é contínua em 👁 {\displaystyle a}
. O recíproco não é verdadeiro, como se pode ver pela função módulo. - Seja 👁 {\displaystyle I}
um intervalo de R com mais do que um ponto, seja 👁 {\displaystyle a}
∈👁 {\displaystyle I}
e sejam 👁 {\displaystyle f}
e 👁 {\displaystyle g}
funções de 👁 {\displaystyle I}
em R deriváveis em 👁 {\displaystyle a}
. Então as funções 👁 {\displaystyle f}
±👁 {\displaystyle g}
, 👁 {\displaystyle f.g}
e (caso 👁 {\displaystyle g(a)}
≠👁 {\displaystyle 0}
) 👁 {\displaystyle f/g}
também são deriváveis em 👁 {\displaystyle a}
e:
Em particular, se 👁 {\displaystyle c}
∈R, então 👁 {\displaystyle (c.f)'=c.f'}
. Resulta daqui e de se ter 👁 {\displaystyle (f+g)'=f'+g'}
que a derivação é uma aplicação linear.
- Sejam 👁 {\displaystyle I}
e 👁 {\displaystyle J}
intervalos de R com mais do que um ponto, seja 👁 {\displaystyle a}
∈👁 {\displaystyle I}
, seja 👁 {\displaystyle f}
uma função de 👁 {\displaystyle I}
em 👁 {\displaystyle J}
derivável em 👁 {\displaystyle a}
e seja seja 👁 {\displaystyle g}
uma função de 👁 {\displaystyle J}
em R derivável em 👁 {\displaystyle f(a)}
. Então 👁 {\displaystyle g}
o👁 {\displaystyle f}
é derivável em 👁 {\displaystyle a}
e
Esta propriedade é conhecida por regra da cadeia.
- Seja 👁 {\displaystyle I}
um intervalo de R com mais do que um ponto, seja 👁 {\displaystyle a}
∈👁 {\displaystyle I}
e seja 👁 {\displaystyle f}
uma função contínua de 👁 {\displaystyle I}
em R derivável em 👁 {\displaystyle a}
com derivada não nula. Então a função inversa 👁 {\displaystyle f^{-1}}
é derivável em 👁 {\displaystyle f(a)}
e
Outra maneira de formular este resultado é: se 👁 {\displaystyle a}
está na imagem de 👁 {\displaystyle f}
e se 👁 {\displaystyle f}
for derivável em 👁 {\displaystyle f^{-1}(a)}
com derivada não nula, então
Assim, por exemplo, se considerarmos a função f de R em R definida por f(x)=x²+x−1, esta é diferenciável em 0. Podem ver-se na imagem abaixo os gráficos das restrições daquela função aos intervalos [−1,1] e [−1/10,1/10] e é claro que, enquanto que o primeiro é bastante curvo (e, portanto, f(x)−f(0) está aí longe de ser linear), o segundo é praticamente indistinguível de um segmento de reta (de declive1). De facto, quanto mais se for ampliando o gráfico próximo de (0,f(0)) mais perto estará este de ser linear.
{kind=link}
{kind=link}
Em contrapartida, a função módulo de R em R não é derivável em 0, pois, por mais que se amplie o gráfico perto de (0,0), este tem sempre o aspecto da figura abaixo.
{kind=link}
{kind=link}
.
Derivabilidade em todo o domínio
[editar | editar código]Diz-se que f é derivável ou diferenciável se o for em todos os pontos do domínio.
{kind=link}
{kind=link}
- Uma função derivável 👁 {\displaystyle f}
de 👁 {\displaystyle I}
em R é constante se e só se a derivada for igual a 👁 {\displaystyle 0}
em todos os pontos. Isto é uma consequência do teorema da média. - Uma função derivável 👁 {\displaystyle f}
de 👁 {\displaystyle I}
em R é crescente se e só se a derivada for maior ou igual a 👁 {\displaystyle 0}
em todos os pontos. Isto também é uma consequência do teorema da média.
Uma função cuja derivada seja sempre maior que 👁 {\displaystyle 0}
é estritamente crescente. Uma observação importante é que existem funções estritamente crescentes em que a derivada assume o valor 👁 {\displaystyle 0}
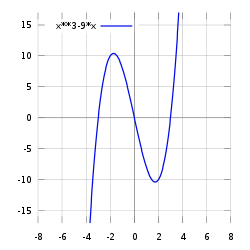
em alguns pontos. É o que acontece, por exemplo com a função de R em R definida por 👁 {\displaystyle f(x)=x^{3}}
. Naturalmente, existem enunciados análogos para funções decrescentes.
- Se 👁 {\displaystyle f}
for uma função derivável de 👁 {\displaystyle I}
em R, sendo 👁 {\displaystyle I}
um intervalo de R com mais do que um ponto, então 👁 {\displaystyle f'(I)}
também é um intervalo de R. Outra maneira de formular este resultado é: se 👁 {\displaystyle f}
for uma função derivável de 👁 {\displaystyle [a,b]}
em R e se 👁 {\displaystyle y}
for um número real situado entre 👁 {\displaystyle f'(a)}
e 👁 {\displaystyle f'(b)}
(isto é, 👁 {\displaystyle f'(a)}
≤👁 {\displaystyle y}
≤👁 {\displaystyle f'(b)}
ou 👁 {\displaystyle f'(a)}
≥👁 {\displaystyle y}
≥👁 {\displaystyle f'(b)}
), então existe algum 👁 {\displaystyle c}
∈👁 {\displaystyle [a,b]}
tal que 👁 {\displaystyle f'(c)=y}
. Este resultado é conhecido por teorema de Darboux.
Funções continuamente deriváveis
[editar | editar código]Seja 👁 {\displaystyle I}
um intervalo de R com mais do que um ponto e seja 👁 {\displaystyle f}
uma função de 👁 {\displaystyle I}
em R. Diz-se que 👁 {\displaystyle f}
é continuamente derivável ou de classe 👁 {\displaystyle C^{1}}
se 👁 {\displaystyle f}
for derivável e, além disso, a sua derivada for contínua. Todas as funções deriváveis que foram vistas acima são continuamente deriváveis. Um exemplo de uma função derivável que não é continuamente derivável é
pois o limite 👁 {\displaystyle \lim _{x\rightarrow 0}f'(x)}
não existe; em particular, f' não é contínua em👁 {\displaystyle 0}
.
Derivadas de ordem superior
[editar | editar código]Quando obtemos a derivada de uma função o resultado é também uma função de x e como tal também pode ser diferenciada. Calculando-se a derivada novamente obtemos então a segunda derivada da função f. De forma semelhante, a derivada da segunda derivada é chamada de terceira derivada e assim por diante. Podemos nos referir às derivadas subsequentes de f por:
e assim sucessivamente. No entanto, a notação mais empregada é:
ou alternativamente,
ou ainda
Se, para algum k∈N, f for k vezes derivável e, além disso, f(k) for uma função contínua, diz-se que f é de classe Ck.
Se a função f tiver derivadas de todas as ordens, diz-se que f é infinitamente derivável ou indefinidamente derivável ou ainda de classe C∞.
Exemplos
[editar | editar código]Se 👁 {\displaystyle c}
∈R, a função 👁 {\displaystyle f}
de R em R definida por 👁 {\displaystyle f(x)=c}
é derivável em todos os pontos de R e a sua derivada é igual a 👁 {\displaystyle 0}
em todos os pontos, pois, para cada 👁 {\displaystyle a}
∈R:
Usando a definição alternativa, basta ver que se se definir 👁 {\displaystyle \phi _{a}}
de R em R por 👁 {\displaystyle \phi _{a}(x)=0}
, então 👁 {\displaystyle \phi _{a}}
é contínua e, para cada 👁 {\displaystyle x}
e cada 👁 {\displaystyle a}
reais, tem-se
além disso, 👁 {\displaystyle f'(a)=\phi _{a}(a)=0}
.
A função 👁 {\displaystyle f}
de R em R definida por 👁 {\displaystyle f(x)=x}
é derivável em todos os pontos de R e a sua derivada é igual a 👁 {\displaystyle 1}
em todos os pontos, pois, para cada 👁 {\displaystyle a}
∈R:
Usando a definição alternativa, basta ver que se se definir 👁 {\displaystyle \phi _{a}}
de R em R por 👁 {\displaystyle \phi _{a}(x)=1}
, então 👁 {\displaystyle \phi _{a}}
é contínua e, para cada 👁 {\displaystyle x}
e cada 👁 {\displaystyle a}
reais, tem-se
além disso, 👁 {\displaystyle f'(a)=\phi _{a}(a)=1}
.
A função 👁 {\displaystyle f}
de R em R definida por 👁 {\displaystyle f(x)=x^{2}}
é derivável em todos os pontos de R e a sua derivada no ponto 👁 {\displaystyle a}
∈R é igual a 👁 {\displaystyle 2a}
, pois:
Usando a definição alternativa, basta ver que se se definir 👁 {\displaystyle \phi _{a}}
de R em R por 👁 {\displaystyle \phi _{a}(x)=x+a}
, então 👁 {\displaystyle \phi _{a}}
é contínua e, para cada 👁 {\displaystyle x}
e cada 👁 {\displaystyle a}
reais, tem-se
além disso, 👁 {\displaystyle f'(a)=\phi _{a}(a)=2a}
.
A função módulo de R em R não é derivável em 👁 {\displaystyle 0}
pois
No entanto, é derivável em todos os outros pontos de R: a derivada em 👁 {\displaystyle a}
é igual a 👁 {\displaystyle 1}
quando 👁 {\displaystyle a>0}
e é igual a 👁 {\displaystyle -1}
quando 👁 {\displaystyle a<0}
.
Ponto de inflexão
[editar | editar código]Um ponto em que a segunda derivada de uma função muda de sinal é chamado de um ponto de inflexão. Em um ponto de inflexão, a segunda derivada pode ser zero, como no caso do ponto de inflexão x = 0 da função y = x³, ou ele pode deixar de existir, como é o caso do ponto de inflexão x = 0 da função y = 👁 {\displaystyle x^{\frac {1}{3}}\,\!}
. Em um ponto de inflexão, uma função convexa passa a ser uma função côncava, ou vice-versa.
Pontos críticos, estacionários ou singulares
[editar | editar código]{kind=link}
Pontos onde a derivada da função é igual a 👁 {\displaystyle 0}
chamam-se normalmente de pontos críticos. Existem cinco tipos de pontos onde isto pode acontecer em uma função. Como a derivada é igual ao declive da tangente em um dado ponto, estes pontos acontecem onde a reta tangente é paralela ao eixo dos 👁 {\displaystyle x}
. Estes pontos podem acontecer:
- onde a função atinge um valor máximo e depois começa a diminuir, chamados máximos locais da função
- onde ela atinge um valor mínimo e começa a aumentar, chamados de mínimos locais da função
- em pontos de inflexão (horizontais) da função, que ocorrem onde a concavidade da função muda. Um exemplo típico é a função 👁 {\displaystyle f(x)=x^{3}}
: no ponto 👁 {\displaystyle x=0}
a função tem um ponto de inflexão (horizontal). - em pontos onde a função oscila indefinidamente entre valores acima ou abaixo, um exemplo típico é a função 👁 {\displaystyle f(x)=x^{2}sin(1/x)}
- em pontos onde a função é localmente constante, ou seja, existe um intervalo contendo o ponto para o qual a restrição da função ao intervalo é a função constante. Um exemplo típico é a função f(x) = |x + 1| + |x - 1| no ponto x=0.
Os pontos críticos são ferramentas úteis para examinar e desenhar gráficos de funções.
Derivadas notáveis
[editar | editar código]A derivada de uma função pode, em princípio, ser calculado a partir da definição, considerando o quociente de diferença, e computar o seu limite. Na prática, uma vez que as derivadas de algumas funções simples são conhecidos, as derivadas de outras funções são mais facilmente calculado usando regras para a obtenção de derivadas de funções mais complicadas das mais simples.
A maioria dos cálculos de derivadas, eventualmente, exige a tomada da derivada de algumas funções comuns. A seguinte lista incompleta é de algumas das funções mais frequentemente utilizadas de uma única variável real e seus derivados.
Alguns exemplos de derivadas notáveis são:
- A função exponencial natural y = ex = exp(x) cuja derivada é igual a si mesma, isto é:
- A função logaritmo natural y = ln(x):
Estes dois fatos não são independentes. De fato, como o logaritmo natural é a inversa da função exponencial, resulta da igualdade 👁 {\displaystyle {\frac {\mathrm {d} }{\mathrm {d} x}}e^{x}=e^{x}}
e da fórmula para a derivada da inversa que
Reciprocamente, supondo-se que, para cada 👁 {\displaystyle x>0}
, 👁 {\displaystyle \log '(x)=1/x}
, então 👁 {\displaystyle \exp '(x)=(\log ^{-1})'(x)={\frac {1}{\log '{\bigl (}\log ^{-1}(x){\bigr )}}}={\frac {1}{1/\exp(x)}}=\exp(x).}
- Também são notáveis as derivadas das funções trigonométricas:
👁 {\displaystyle {\frac {\mathrm {d} }{\mathrm {d} x}}\sin(x)=\cos(x).}
👁 {\displaystyle {\frac {\mathrm {d} }{\mathrm {d} x}}\cos(x)=-\sin(x).}
👁 {\displaystyle {\frac {\mathrm {d} }{\mathrm {d} x}}\csc(x)=-\cot(x)\csc(x)}
👁 {\displaystyle {\frac {\mathrm {d} }{\mathrm {d} x}}\sec(x)=\sec(x)\tan(x)}
👁 {\displaystyle {\frac {\mathrm {d} }{\mathrm {d} x}}\cot(x)=-\csc ^{2}(x)}
- E funções Funções trigonométricas inversas:
👁 {\displaystyle {\frac {\mathrm {d} }{\mathrm {d} x}}\arctan(x)={\frac {1}{1+x^{2}}}}
Neste último caso, as derivadas resultam das fórmulas para as derivadas das funções trigonométricas juntamente com a fórmula para a derivada da inversa e a fórmula fundamental da trigonometria.
Regras para funções combinadas
[editar | editar código]Em muitos casos, a aplicação direta do quociente de diferença de Newton pode ser evitado usando regras de diferenciação, evitando complicados cálculos de limite. Algumas das regras mais básicas são as seguintes:
- Regra da constante: se f(x) é constante, então:
- Regra da soma:
👁 {\displaystyle (\alpha f+\beta g)'=\alpha f'+\beta g'\,}
para todas as funções f e g e todos os números reais 👁 {\displaystyle \alpha }
e 👁 {\displaystyle \ beta}
👁 {\displaystyle (fg)'=f'g+fg'\,}
para todas as funções f e g. Por conseguinte, isso significa que a derivada de uma constante vezes uma função é a constante vezes a derivada da função
👁 {\displaystyle {\frac {\mathrm {d} }{\mathrm {d} r}}\pi r^{2}=2\pi r.\,}
👁 {\displaystyle \left({\frac {f}{g}}\right)'={\frac {f'g-fg'}{g^{2}}}}
para todas as funções f e g, em que g ≠ 0.
Se 👁 {\displaystyle f(x)=h(g(x)),}
então:
Exemplo de uso
[editar | editar código]A derivada de 👁 {\displaystyle f(x)=x^{4}+\sin(x^{2})-\ln(x)e^{x}+7\,}
As derivadas conhecidas de funções elementares 👁 {\displaystyle x^{2},x^{4},}
sen(x) e 👁 {\displaystyle exp(x)=e^{x}}
, assim como a constante 7, também foram usadas.
Funções de uma variável complexa
[editar | editar código]Se A for um conjunto de números complexos, se f for uma função de A em C e se a for um ponto não isolado de A (isto é, se tão perto quanto se queira de a houver outros elementos de A), então as duas definições da derivada de f no pontoa continuam a fazer sentido. De facto, as propriedades acima descritas para o caso real continuam válidas, excepto, mais uma vez, as que dizem respeito à monotonia de funções.
Física
[editar | editar código]Uma das mais importantes aplicações da Análise à Física (senão a mais importante), é o conceito de derivada temporal— a taxa de mudança ao longo do tempo— que é necessária para a definição precisa de vários importantes conceitos. Em particular, as derivadas temporais da posição s de um objeto são importantes na física newtoniana:
- Velocidade (velocidade instantânea; o conceito de velocidade média é anterior à Análise) v é a derivada (com respeito ao tempo) da posição do objeto.
- Aceleração a é a derivada (com respeito ao tempo) da velocidade de um objeto.
Posto de outro modo:
Por exemplo, se a posição de um objeto é s(t)=−16t²+16t+32, então a velocidade do objeto é s′(t)=−32t+16 e a aceleração do objeto é s′′(t)=−32. Uma forma de enunciar a segunda lei de Newton é F=dp/dt , sendo p o momento linear do objeto.
Derivadas em maiores dimensões
[editar | editar código]Em dimensão 1, as derivadas são pensadas como números pois, nesta dimensão, um número e uma transformação linear são a mesma coisa. Entretanto, para dimensões maiores, as derivadas necessitam ser tratadas como transformações lineares.[4]
Derivadas de funções vetoriais
[editar | editar código]Uma função vetorial y(t) de uma variável real de uma variável real envia números reais de vetores em 👁 {\displaystyle R^{n}}
algum espaço vetorial. A função vetorial pode ser dividido em suas funções coordenadas y1(t), y2(t),...,yn(t), significando que y(t) = (👁 {\displaystyle y_{1}}
(t), ..., 👁 {\displaystyle y_{n}}
(t)). Isto inclui, por exemplo, curvas paramétricas em R² ou R³.
As funções de coordenadas são funções de valores reais, de modo que a definição acima de derivada aplica-se a eles. A derivada de y (t) é definida como sendo o vetor, chamado o vetor tangente, cujas coordenadas são as derivadas das funções de coordenadas. Isto é,
👁 {\displaystyle \mathbf {y} '(t)=(y'_{1}(t),\ldots ,y'_{n}(t)).}
equivalentemente,
👁 {\displaystyle \mathbf {y} '(t)=\lim _{h\to 0}{\frac {\mathbf {y} (t+h)-\mathbf {y} (t)}{h}},}
se o limite existe.
A subtração no numerador é a subtração de vetores, não escalares. Se a derivada de y existe para cada valor de t, então y' é outra função vetorial.
Se 👁 {\displaystyle e_{1}}
, ..., 👁 {\displaystyle e_{n}}
é a base padrão para 👁 {\displaystyle R^{n}}
, então y (t) também pode ser escrito como 👁 {\displaystyle y_{1}}
(t)👁 {\displaystyle e_{1}}
+ ... + 👁 {\displaystyle y_{n}}
(t)👁 {\displaystyle e_{n}}
. Se assumirmos que a derivada de uma função vetorial mantém a propriedade da linearidade, então a derivada de y (t) deve ser
👁 {\displaystyle y'_{1}(t)\mathbf {e} _{1}+\cdots +y'_{n}(t)\mathbf {e} _{n}}
porque cada um dos vetores de base é uma constante.
Esta generalização é útil, por exemplo, se y (t) é o vetor de posição de uma partícula no tempo t; em seguida, o derivado y '(t) é o vetor de velocidade da partícula no tempo t.
Derivadas parciais
[editar | editar código]Quando uma função depende de mais do que uma variável, podemos usar o conceito de derivada parcial. Podemos entender as derivadas parciais como a derivada de uma função para uma determinada variável, enquanto as outras se mantêm fixadas. No gráfico, é usada para determinar a variação da função em um determinado eixo. Derivadas parciais são representadas como, por exemplo, ∂z/∂x, sendo x a variável fixada sobre uma função em z.
Suponha que f é uma função que depende mais de uma variável, por exemplo,
👁 {\displaystyle f(x,y)=x^{2}+xy+y^{2}.\,}
f pode ser reinterpretado como uma família de funções de uma variável indexada pelas outras variáveis:
👁 {\displaystyle f(x,y)=f_{x}(y)=x^{2}+xy+y^{2}.\,}
Em outras palavras, cada valor de x escolhe uma função, denotando 👁 {\displaystyle f_{x}}
, que é uma função de um número real. Ou seja,
👁 {\displaystyle x\mapsto f_{x},\,}
👁 {\displaystyle f_{x}(y)=x^{2}+xy+y^{2}.\,}
Uma vez que um valor de x é escolhido, digamos a, então f(x,y) determina a função 👁 {\displaystyle f_{a}}
que envia y a a2+ay+y2:
👁 {\displaystyle f_{a}(y)=a^{2}+ay+y^{2}.\,}
Nesta expressão, a é uma constante, e não uma variável, de modo que 👁 {\displaystyle f_{a}}
é uma função de uma única variável real. Consequentemente, a definição da derivada para uma função de uma variável aplica-se:
👁 {\displaystyle f_{a}'(y)=a+2y.\,}
O procedimento acima pode ser realizada por qualquer escolha de a. Montando as derivadas juntas em uma função, dá uma função que descreve a variação de f na direção y:
👁 {\displaystyle {\frac {\partial f}{\partial y}}(x,y)=x+2y.}
Esta é a derivada parcial de f em relação a y. Aqui, ∂ é o símbolo derivada parcial.
Em geral, a derivada parcial de uma função f (👁 {\displaystyle x_{1}}
, ..., 👁 {\displaystyle x_{n}}
) na direção de 👁 {\displaystyle x_{i}}
, no ponto (👁 {\displaystyle a_{1}}
..., 👁 {\displaystyle a_{n}}
) é definido como sendo:
Na diferença de quociente acima, todas as variáveis, exceto 👁 {\displaystyle x_{i}}
, são mantidos fixos. Essa escolha de valores fixos determina uma função de uma variável.
e por definição,
Em outras palavras, as diferentes opções de classificar uma família de funções de uma variável tal como no exemplo acima. Esta expressão também mostra que o cálculo das derivadas parciais reduz para o cálculo dos derivados de uma variável.
Um exemplo importante de uma função de várias variáveis é o caso de uma função de valor escalar f (👁 {\displaystyle x_{1}}
, ..., 👁 {\displaystyle x_{n}}
) em um domínio no espaço Euclidiano 👁 {\displaystyle R^{n}}
(por exemplo, em R² ou R²). Neste caso, f tem uma derivada parcial ∂f / ∂xj em relação a cada variável 👁 {\displaystyle x_{j}}
. No ponto a, estas derivadas parciais definem o vetor
Este vetor é denominado gradiente de f em a. Se f é diferenciável em todos os pontos em algum domínio, então o gradiente é uma função vetorial ∇f que leva o ponto a para o vetor ∇f(a).
Consequentemente, o gradiente determina um campo vetorial.
Derivadas direcionais
[editar | editar código]Se f é uma função com valores reais em 👁 {\displaystyle R^{n}}
, então a derivada parcial de f mede a sua variação na direção dos eixos das coordenadas. Por exemplo, se f é uma função de x e y, então sua derivada parcial mede a variação em f na direção x e na direção y. Contudo, elas (derivadas parciais) não medem diretamente a variação de f em qualquer outra direção, tal como aquela ao longo da linha diagonal y=x. Estas são medidas usando-se as derivadas direcionais. Escolha um vetor:
👁 {\displaystyle \mathbf {v} =(v_{1},\ldots ,v_{n}).}
A derivada direcional de f na direção de v no ponto x é o limite
Em alguns casos pode ser mais fácil computar ou estimar a derivada direcional depois de mudar o comprimento do vetor. Frequentemente isso é feito para transformar o problema numa computação de uma derivada direcional na direção de um vetor unitário. Para ver como isso funciona, suponha v = λu. Substitua h = k/λ no quociente da diferença.
O quociente da diferença torna-se:
Isso é λ vezes o quociente da diferença para a derivada direcional de f no que diz respeito a u. Além disso, tomar o limite como h tendendo a zero é o mesmo que tomar o limite como k tendendo a zero, pois h e k são múltiplos um do outro.
Portanto, Dv(f) = λDu(f). Devido a essa propriedade de redirecionamento, derivadas direcionais são frequentemente consideradas apenas para vetores unitários.
Se todas as derivadas parciais de f existem e são contínuas em x, então elas determinam a derivada direcional de f na direção de v pela fórmula:
Essa é a consequência da definição de derivada total. Diz-se que a derivada direcional é linear em v, significando que D👁 {\displaystyle _{V}}
+ 👁 {\displaystyle _{W}}
(f) = D👁 {\displaystyle _{V}}
(f) + D👁 {\displaystyle _{W}}
(f).
A mesma definição também é aplicável quando f é a função com valores em 👁 {\displaystyle R^{m}}
. . A definição acima é aplicada a cada componente dos vetores. Nesse caso, a derivada direcional é um vetor em 👁 {\displaystyle R^{m}}
.
Derivadas de aplicações
[editar | editar código]Sejam 👁 {\displaystyle U}
um aberto de 👁 {\displaystyle {\mathbb {R} }^{m}}
, 👁 {\displaystyle z_{0}\in U}
e 👁 {\displaystyle f:U\rightarrow {\mathbb {R} }^{n}}
uma função. Dizemos que 👁 {\displaystyle f}
é diferenciável quando existem uma transformação linear 👁 {\displaystyle T:{\mathbb {R} }^{m}\rightarrow {\mathbb {R} }^{n}}
e uma função 👁 {\displaystyle r:\{z-z_{0}:z\in U\}\rightarrow {\mathbb {R} }^{n}}
dada por 👁 {\displaystyle r(h)=f(z_{0}+h)-f(z_{0})-T.h}
tais que
👁 {\displaystyle \lim _{h\rightarrow 0}{\frac {r(h)}{|h|}}=0}
.
Neste caso, a aplicação 👁 {\displaystyle T}
é chamada de derivada da função 👁 {\displaystyle f}
no ponto 👁 {\displaystyle z_{0}}
e denotada por 👁 {\displaystyle Df(z_{0})}
. Em outras palavras
👁 {\displaystyle Df(z_{0})=\lim _{t\rightarrow 0}{\frac {f(x+tz_{0})-f(x)}{t}}.}
Exemplos
[editar | editar código]- Se 👁 {\displaystyle f:U\subset \mathbb {R} \rightarrow \mathbb {R} }
, 👁 {\displaystyle z_{0}\in U}
e 👁 {\displaystyle h\in \mathbb {R} }
, então 👁 {\displaystyle Df(z_{0})h=h.f'(z_{0}).} - Se 👁 {\displaystyle f:U\subset \mathbb {R} \rightarrow {\mathbb {R} }^{n}}
, 👁 {\displaystyle z_{0}\in U}
e 👁 {\displaystyle h\in \mathbb {R} ,}
então 👁 {\displaystyle Df(z_{0})h=h.(f_{1}'(z_{0}),f_{2}'(z_{0}),...,f_{n}'(z_{0})).} - Se 👁 {\displaystyle f:U\subset \mathbb {R} ^{m}\rightarrow {\mathbb {R} }}
, 👁 {\displaystyle z_{0}\in U}
e 👁 {\displaystyle h=(h_{1},\cdots ,h_{m})\in \mathbb {R} ^{m},}
então 👁 {\displaystyle Df(z_{0})h=h_{1}.{\partial f \over \partial x_{1}}(z_{0})+\cdots +h_{m}.{\partial f \over \partial x_{m}}(z_{0})} - Se 👁 {\displaystyle f:U\subset \mathbb {R} ^{m}\rightarrow {\mathbb {R} }^{n}}
, 👁 {\displaystyle z_{0}\in U}
e 👁 {\displaystyle h\in \mathbb {R} ^{n},}
então 👁 {\displaystyle Df(z_{0})h=(h.\nabla f_{1}(z_{0}),\cdots ,h.\nabla f_{n}(z_{0}))}
Nesta definição, podemos considerar a derivada parcial de uma aplicação como sendo
👁 {\displaystyle {\frac {\partial f}{\partial x_{j}}}(x)=Df(x)e_{j}.}
Podemos repensar nessa igualdade. Se observarmos que 👁 {\displaystyle e_{j}x}
corresponde à 👁 {\displaystyle j}
-ésima coordenada de 👁 {\displaystyle x}
e que a 👁 {\displaystyle j}
-ésima coordenada de 👁 {\displaystyle \nabla f(z_{0})}
é 👁 {\displaystyle {\frac {\partial f}{\partial x_{j}}}(z_{0})}
segue que 👁 {\displaystyle {\frac {\partial f}{\partial x_{j}}}(z_{0})=\left({\frac {\partial f_{1}}{\partial x_{j}}}(z_{0}),\cdots ,{\frac {\partial f_{n}}{\partial x_{j}}}(z_{0})\right)}
Referências
- ↑ STEWART, James. Curso de cálculo volume 1. São Paulo: Pioneira Thomson Learning, 2002. 4ªa edição. ISBN 85-221-0236-8. Página 159.
- ↑ Anton, Howard (2009). Cálculo - Volume 1 8 ed. [S.l.]: Bookman. ISBN9788560031634
- ↑ STEWART, James. Curso de cálculo volume 1. São Paulo: Pioneira Thomson Learning, 2002. 4ªa edição. ISBN 85-221-0236-8. Página 156.
- ↑ Lima 1981, Prefácio.
Bibliografia
[editar | editar código]- Agudo, F. R. Dias, Análise Real (3 volumes), Lisboa: Escolar Editora, 1994
- Lima, Elon Lages (1981). Curso de análise, Volume 2. Instituto de Matemática Pura e Aplicada. Rio de Janeiro: Instituto de Matemática Pura e Aplicada
- Ostrowski, A., Lições de Cálculo Diferencial e Integral (3 volumes), Lisboa: Fundação Calouste Gulbenkian, 1981
- Ricieri, A. P., Derivada Fracionária, Transformada de Laplace e outros bichos, Prandiano, 1993, S. José dos Campos - SP - Brasil.
Ver também
[editar | editar código]Ligações externas
[editar | editar código]- «Rei da Derivada - Torneio inventado pelo prof. Ricardo Fragelli para ensino de derivadas»
- «Cálculo diferencial para funções trigonométricas» (PDF)
- «tese de Engenharia Mecânica aplicando derivadas fracionárias» (PDF)
- «Equações generalizadas de difusão (aplica derivadas parciais fracionárias)»
- «Calculadora de derivadas com soluções detalhadas passo a passo e gráficos»
- «Calcular derivada passo a passo» (em inglês)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}