Breadth First Search (BFS) for Artificial Intelligence
Last Updated : 11 Jun, 2026
Breadth First Search (BFS) is an uninformed search algorithm used to traverse or search graph and tree structures. It explores nodes level by level, visiting all nodes at the current depth before moving to the next depth level.
Uses a queue to maintain the order of node expansion.
Does not require heuristic information.
Guarantees the shortest path in unweighted graphs.
Need for Breadth-First Search
Some problems require finding the shortest path between states.
A systematic exploration strategy is needed to avoid missing solutions.
Many AI problems involve searching large state spaces represented as graphs or trees.
BFS provides a complete search method when all actions have equal cost.
Key Characteristics
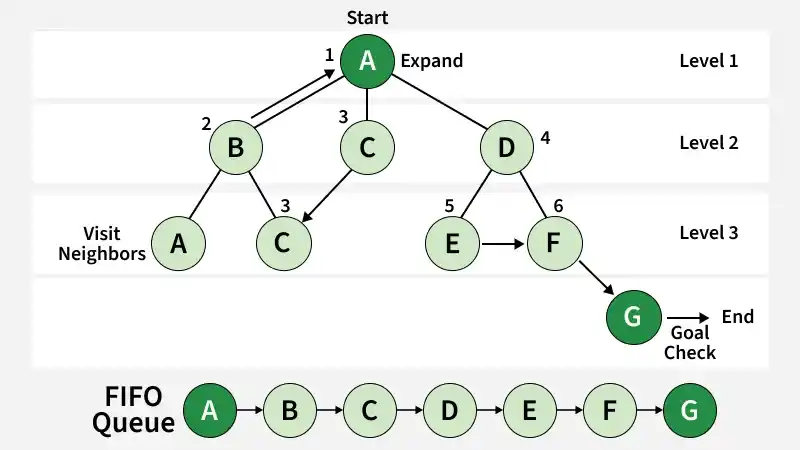
First-In-First-Out (FIFO): BFS uses a queue that follows the FIFO principle. Nodes discovered earlier are expanded before nodes discovered later, ensuring level-by-level exploration.
Level-Order Exploration: The algorithm visits all nodes at one depth level before moving to the next level, guaranteeing systematic traversal of the search space.
Early Goal Test: The goal condition is checked as soon as a new node is generated. This helps terminate the search immediately when a solution is found.
Complete Search: BFS is complete, meaning it will find a solution if one exists in a finite search space.
Optimal for Unweighted Graphs: Since nodes are explored in order of increasing depth, BFS always finds the shortest path when all actions have equal cost.
Working
Initialization: The search begins from the start node, which is added to the queue and marked as visited.
Node Expansion: The node at the front of the queue is removed and selected for processing.
Neighbor Exploration: All unvisited neighboring nodes are discovered, marked as visited, and added to the queue.
Level-by-Level Traversal: Nodes are expanded in the order they were discovered, ensuring all nodes at the current depth are explored first.
Goal Checking: The algorithm checks whether the current node satisfies the goal condition during traversal.
Termination: The search stops when the goal is found or when all reachable nodes have been explored.
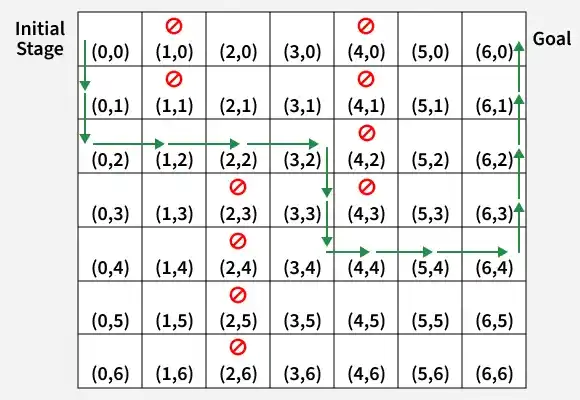
Consider a robot placed in an environment that needs to reach a goal location. The robot explores all neighboring positions level by level using Breadth-First Search (BFS). The following implementation demonstrates how BFS helps the robot find the shortest path while avoiding obstacles.
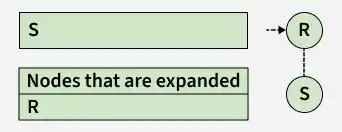
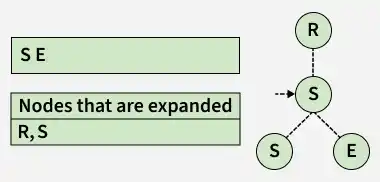
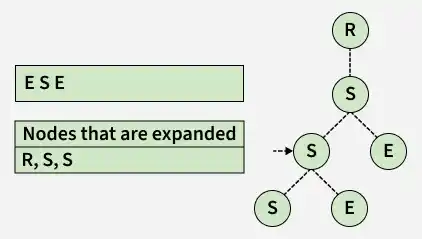
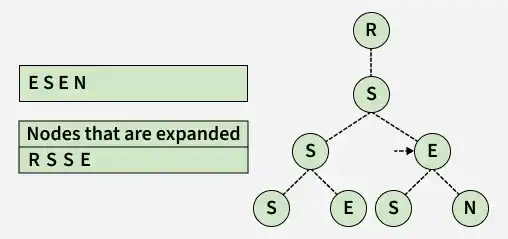
The robot begins at node R, which acts as the root node of the search tree. Since BFS follows the FIFO principle, the starting node is marked as visited and added to the queue.
The robot successfully reaches the goal node (6,0). Since BFS explores all nodes level by level, the path obtained is the shortest available path from the starting position to the goal.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}