Informed Search Algorithms in Artificial Intelligence
Last Updated : 21 Aug, 2025
Informed search algorithms in AI are search methods that use extra knowledge, called heuristics, to prioritize which paths to explore. By estimating how close each possible step is to the goal, these algorithms can find solutions more quickly and efficiently than uninformed or “blind,” search. They are widely used in AI for tasks like pathfinding and puzzle solving because they help navigate large, complex search spaces.
Let's see some popular informed search algorithm,
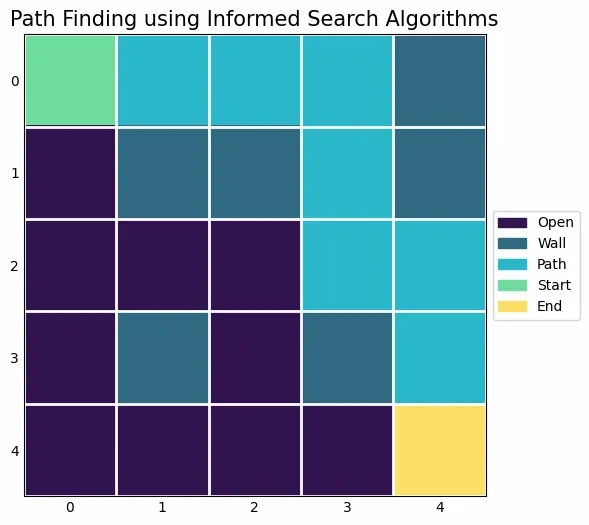
We will use this maze example to show the working of All Algorithms.
1. Greedy Best-First Search
Greedy Best-First Search always picks the next step that looks closest to the goal, using a guess (heuristic) about which choice is best. It tries to reach the goal as quickly as possible but isn’t guaranteed to find the shortest path.
Advantage: Efficient at quickly finding a solution by following the most promising paths.
Limitation: Can get stuck in local optima; does not guarantee finding the shortest (optimal) path.
Code Implementation
In the code:
A priority queue (min-heap) is used to always pick the cell that looks closest to the goal (based only on heuristic distance).
It tracks where each cell came from (came_from) to reconstruct the path at the end.
It expands neighbors only if they are valid, not walls and not visited before.
When the goal is reached, the path is reconstructed backwards.
A* Search finds the shortest path by combining two things: how far we have already gone and a guess of how far is left to go. It checks both actual progress and potential, so it’s very reliable if our guess (heuristic) is good. It uses a combined cost function actual path cost so far plus heuristic estimate to the goal. Finds both shortest and most cost-effective path with an admissible heuristic.
Advantage: Complete and optimal (when using an admissible heuristic); widely applicable.
Limitation: Can consume high memory for large graphs or spaces
Code Implementation
In the code:
1. Similar to greedy, but now the priority = g(n) + h(n):
g(n) = cost so far (steps already taken).
h(n) = heuristic estimate to the goal.
2. A cost_so_far dictionary is kept to ensure we only update when a cheaper path is found.
3. At each step, the cell with the smallest estimated total cost is chosen.
Beam Search keeps track of only a set number of the best-looking options at each step (instead of everything). It moves forward with “the best few” options and ignores the rest, making it faster and lighter on memory, but it might miss the absolute best path.
Advantage: Reduces memory usage; effective in large or combinatorial search spaces.
Limitation: May miss the optimal solution; solution quality depends on beam width.
Code Implementation
In the code:
1. Instead of exploring all possible paths, it only keeps the best few (beam_width) paths at each level.
2. At every step:
Expands all current paths into neighbors.
Sorts them based on heuristic distance to the goal.
Keeps only the top beam_width promising ones.
3. Continues until goal is found or no paths left.

{kind=link}
{kind=link}