 |
VOOZH | about |
|
VOOZH | about |
Like it is said, "One picture is worth more than ten thousand words "A digital image is composed of thousands and thousands of pixels.
An image could also be defined as a two-dimensional function, f(x, y), where x and y are spatial (plane) coordinates and therefore the amplitude of f at any pair of coordinates (x, y) is named the intensity or grey level of the image at that time. When x, y, and therefore the amplitude values of f are all finite, discrete quantities, we call the image a digital image.
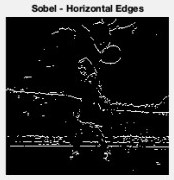
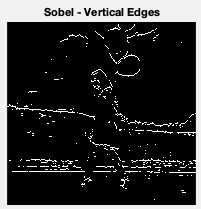
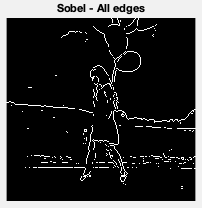
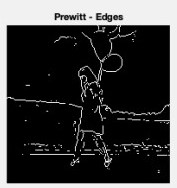
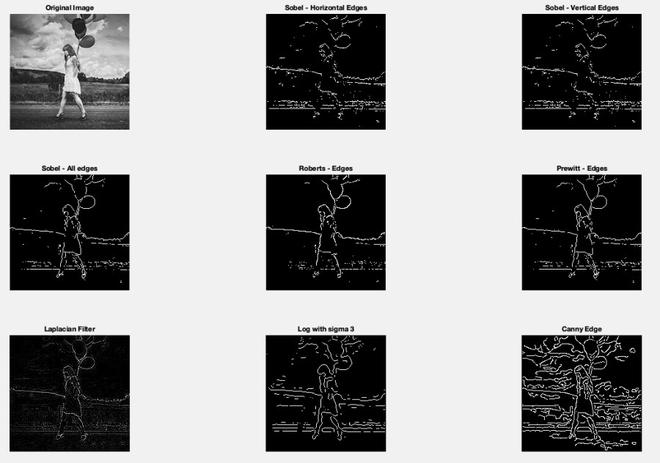
Following filters are used for Edge Detection and discontinuities of an image.
First derivative Operators:
Second derivative Operators:
The gradient-based method such as Prewitt has the most important drawback of being sensitive to noise. The Canny edge detector is less sensitive to noise but more expensive than Robert, Sobel and Prewitt. However, Canny edge detector performs better than all masks.
Input:
Code:
Call the above function using the MATLAB command window.
Output:
👁 ImageInput:
Code:
Call the above function using the MATLAB command window.
Output:
👁 ImageInput:
Code:
Call the above function using the MATLAB command window.
Output:
👁 ImageInput:
Code:
Call the above function using the MATLAB command window.
Output:
👁 ImageInput:
Code:
Call the above function using the MATLAB command window.
Output:
👁 ImageInput:
Code:
Call the above function using the MATLAB command window.
Output:
👁 ImageCanny Edge Detector gives the best results compared to other filters/masks used to detect the edges in an image.
It is global processing and specialization of Hough Transform. It is used to detect the circles in an input image. This transform is selective to circles and ignores elongated ellipses.
Input:
Code:
Call the above function using the MATLAB command window.
Output:
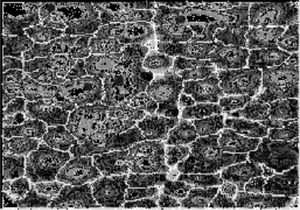
It is a local thresholding method in which we are thresholding an input image locally, passing some parameters. We took an image which is already edge operated.
Input:
Code:
Call the above function using the MATLAB command window.
Output:
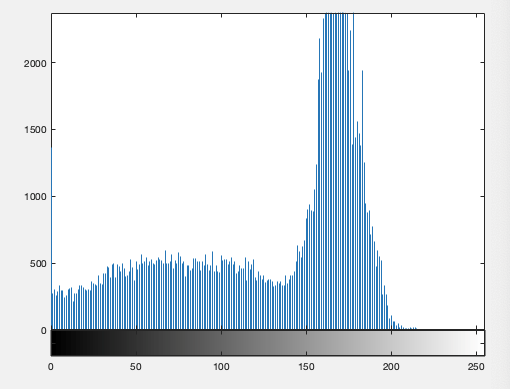
👁 ImageIt is a method of optimum global thresholding. Otsu gives the best result when compared to threshold selection under local thresholding. This method minimizes the weighted within-class variance.
Input:
Code:
Call the above function using the MATLAB command window.
Output:
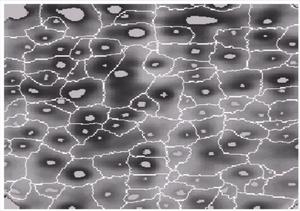
In this, the local minima of grey levels give the catchment basins and the local maxima define the watershed lines. In the output image, it is easy to detect the markers.
Input:
Code:
Call the above function using the MATLAB command window.
Output:
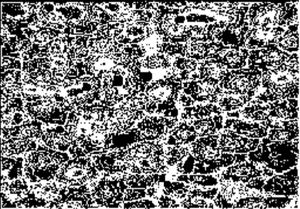
👁 ImageIt is an algorithm which is used to segment the interest area from the background. Partition the data points into K clusters randomly. Find the centroids of each cluster.
It operates on a 2D array where pixels in rows and RGB in columns. We take mean values for each class (K=3).
Input:
Code:
Call the above function using the MATLAB command window.
Output:
K = 3 iter phase num sum 1 1 178888 1.52491e+08 2 1 7657 1.45223e+08 3 1 4597 1.42317e+08 4 1 3750 1.40017e+08 5 1 3034 1.38203e+08 6 1 2187 1.37096e+08 7 1 1552 1.36481e+08 8 1 1044 1.36165e+08 9 1 701 1.36014e+08 10 1 479 1.35939e+08 11 1 311 1.35906e+08 12 1 282 1.35883e+08 13 1 193 1.3587e+08 14 1 124 1.35865e+08 15 1 85 1.35863e+08 16 1 60 1.35861e+08 17 1 80 1.3586e+08 18 1 79 1.35858e+08 19 1 23 1.35858e+08 20 1 48 1.35858e+08 21 1 7 1.35858e+08 Best total sum of distances = 1.35858e+08
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}