In a Real-Time System (RTS), tasks must be executed and completed within strict timing constraints or deadlines. These systems are widely used in applications where delayed responses can cause severe consequences, such as in flight control systems, real-time monitors, medical devices and industrial automation systems.
Note: Real-time systems are designed to guarantee timely execution and their tasks are categorized based on timing characteristics and criticality.
Types of Tasks in Real-Time Systems
1. Periodic Tasks
Definition: Tasks that occur at regular, fixed time intervals.
Each periodic task is represented by a 4-tuple:
Where:
Phase (release time of the first job). Defaults to zero if not specified.
Period of the task (time interval between consecutive releases).
Execution time (CPU time needed to complete the job).
Relative deadline (time by which the job must complete).
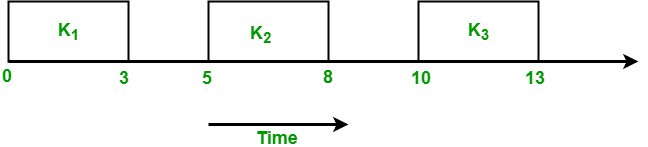
Example: A task with period = 5 seconds and execution time = 3 seconds:
First job released at t = 0, executes for 3s.
Next job released at t = 5, executes for 3s.
Jobs are released at t = 5k, where k = 0, 1, 2, ...

{kind=link}
{kind=link}
{kind=link}
{kind=link}