 |
VOOZH | about |
|
VOOZH | about |
Linear algebra is the study of linear combinations. It is the study of vector spaces, lines and planes, and some mappings that are required to perform the linear transformations. It includes vectors, matrices and linear functions.
Table of Content
Key Operations in a Vector Space:
Axioms of Vector Space: A vector space V must satisfy the following 10 axioms for any vectors x,y,z ∈V and scalars a,b ∈F :
Examples of Vector Spaces:
A subspace W of a vector space V is a subset of V that is itself a vector space, satisfying:
Example:
In , the set of all vectors of the form (x,0) (i.e., all vectors along the x-axis) is a subspace
Basis of Vector Space:
A collection of vectors is a basis for a vector space V if it is linearly independent and spans V, meaning every vector in V can be expressed as a linear combination of the vectors in B.
Example : Standard Basis in :
this are the basis of
Dimension of a Vector Space:
Number of vectors in a basis for V is called the dimension of V.
Example: 1) dim
2) dim of matrix of order “2 × 2” is 4.
read more about Basis and Dimension of Vector Space.
Linear Independence: if a set of vectors is linearly independent, the only solution to the equation
is when all the scalars are equal to zero.
Linear Dependence: If there exists a non-trivial solution (i.e., some are not zero), then the vectors are linearly dependent
Example:
Consider the vectors and in These vectors are linearly independent because no scalar multiple of one can produce the other.
However, for and they are linearly dependent because is just
A matrix is a collection of numbers arranged in rows and columns. It's typically enclosed in brackets, and the size or order is denoted as "rows × columns".
Transpose of a Matrix: The transpose of a matrix M, denoted is obtained by swapping its rows and columns. If then where
Rank of a Matrix: The rank of a matrix is the maximum number of linearly independent rows or columns. It determines the dimension of the row space or column space.
Example: Consider the matrix:
The matrix has 2 non-zero rows, so the rank of A is 2.
Properties of Matrices:
Trace of a Matrix: The trace is the sum of the diagonal elements of a square matrix,
Example: Consider the matrix
Thus, the trace of matrix A is 8.
Adjoint of a square Matrix: The adjoint of a square matrix A is the transpose of its cofactor matrix.
has properties like
Determinant of Matrices: The determinant of a matrix represents the scaling factor of the linear transformation associated with that matrix. For example, in a 2×2 matrix, the determinant indicates how the area is scaled when the matrix transforms a shape.
Properties of Determinant:
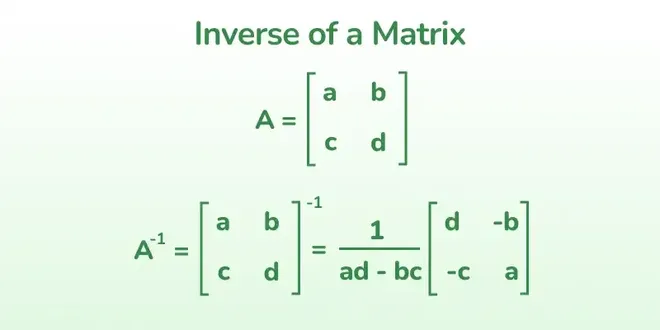
Inverse of a Matrix: (only for non-singular matrices).
Null Space:
The null space of a matrix A consists of all vectors B such that A⋅B=0 , where B is not the zero vector. It represents the set of solutions to the homogeneous system of linear equations A⋅B=0, and is a subspace of the vector space.
Nullity:
The nullity of a matrix is the dimension of its null space, representing the number of linearly independent vectors that form the null space. It indicates how many free variables exist in the solution to A⋅B=0.
Rank-Nullity Theorem: nullity of a matrix A
Nullity of A + Rank of A = Number of columns of A
Orthogonal Matrix:
A square matrix A is orthogonal if its transpose is equal to its inverse, i.e.,
This implies:
where I is the identity matrix
Properties:
An idempotent matrix is a square matrix that, when multiplied by itself, gives back the same matrix. A matrix P is said to be idempotent if
Example:
The matrix given below is an idempotent matrix of order “2 × 2.”
Partition Matrix:
A Partition Matrix refers to dividing a matrix into smaller, non-overlapping submatrices (blocks)
Given the matrix:
We can partition it into 4 smaller 2x2 submatrices:
where:
Projection Matrix:
A matrix P is a projection matrix if
Note: not all idempotent matrices are projection matrices. Projection matrices are a specific type of idempotent matrix, typically used to map vectors onto a subspace
A system of linear equations is a set of equations with common variables, represented as:
The solution is the set of values that satisfy all equations simultaneously, representing points of intersection among the equations.
Types of Solutions:
Homogeneous Linear Equations:
AX=0 always has the trivial solution X=0.
Non-Homogeneous Linear Equations:
AX=Bcan have different solutions based on the rank of the augmented matrix:
Consistent vs Inconsistent:
Gaussian elimination is a method for solving a system of linear equations by transforming the system's matrix into an upper triangular matrix and then performing back substitution to find the solution.
Steps:
Example: Solve the system: x+y=5x , 2x−y=1
augmented matrix:
Eliminate x from second row:Perform
Solve for y: y=3
Substitute y=3 into first equation to solve for x: x=2
Solution: x=2, y=3
Steps to Find Eigenvalues and Eigenvectors
Find Eigenvalues:
Solve the characteristic equation , where I is the identity matrix and represents the eigenvalue.
Find Eigenvectors:
For each eigenvalue solve to find the corresponding eigenvector v.
read more about Eigenvalues and Eigenvectors.
LU Decomposition (or LU Factorization) is the process of decomposing a square matrix A into the product of two matrices:
A=L⋅U
where L is a lower triangular matrix (with ones on the diagonal) and U is an upper triangular matrix.
Steps:
Singular Value Decomposition (SVD) is a method of factorizing a matrix A into three matrices:
where:
Steps to Compute SVD:
{kind=link}
{kind=link}
-660.webp){kind=link}