 |
VOOZH | about |
|
VOOZH | about |
In digital image processing edges are places where the brightness or color in an image changes a lot. These changes usually happen at borders of objects. Detecting edges helps us understand the shape, size and location of different parts in an image. Edge detection is used to recognize patterns, understand image structure and pick out important features in images.
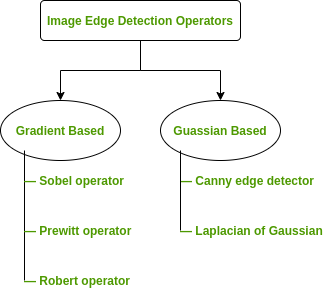
There are main types of edge detection methods:
Gradient-based operators detect edges by measuring how quickly the pixel values or brightness changes in a image. These changes are called gradients. If the change is large between two neighboring pixels that indicates an edge. They use first derivative to find edges.
Gaussian-based operators combine blurring and edge detection. They reduce the effect of noise by smoothing the image first and then look for changes using the second derivative. These are more advanced and accurate than gradient-based operators.
👁 ImageThe Sobel Operator is a method used to detect edges in an image by checking how pixel values (brightness) change in the horizontal and vertical directions. It uses two 3 x 3 kernels or masks which are convolved with the input image to calculate the vertical and horizontal derivative approximations respectively:
where:
By combining the results from both it finds the overall edge strength and direction.
It is very similar to the Sobel Operator but with slight difference is that it calculates the edge gradients. Like Sobel it detects edges in the horizontal and vertical directions using two 3×3 matrices but it uses a uniform averaging technique in its kernel making it less accurate than Sobel but faster and simpler to implement.
where:
By combining the results from both it finds the overall edge strength and direction.
It is one of the simplest edge detection methods as it focuses on how pixel values change diagonally in an image. The operator uses a 2×2 kernel to calculate the gradient of intensity between diagonally adjacent pixels and make it suitable for detecting edges that appear along diagonal directions.
where:
By combining the results of both kernels the Roberts operator calculates the gradient magnitude to highlight edges.
Marr-Hildreth Operator is also called Laplacian of Gaussian (LoG) and it is a Gaussian-based edge detection method. It works by first smoothing the image using a Gaussian filter to remove noise and then applying the Laplacian operator to detect regions where the intensity changes sharply. The LoG operator first smooths the image using a Gaussian filter to reduce noise then applies the Laplacian to detect edges. It detects edges at zero-crossings where the result changes from positive to negative.
Where:
Use LoG when your image is noisy and you need clean it.
The Canny operator is one of the most advanced and widely used edge detection methods. It uses a multi-step process to detect sharp and clean edges while minimizing noise. Before detecting edges we remove noise using a Gaussian Blur and smoothens the image.
1. Find Intensity Gradient: In this step we find where the image changes the most this helps detect edges. We use Sobel filters to find gradients in x and y directions:
2. Non-Maximum Suppression: We thin the edges by keeping only the local maximum gradient in the direction of the edge. It removes pixels that are not part of a strong edge.
3. Double Thresholding: Here we classify pixels into:
4. Edge Tracking by Hysteresis: The final step connects weak edges to strong edges if they are part of the same structure. Isolated weak edges are removed.
It’s good for applications needing precise and reliable edge detection like medical imaging, facial recognition or object tracking.
{kind=link}
{kind=link}