Reinforcement Learning (RL) has become a transformative approach in robotics, enabling robots to learn complex behaviors through trial and error interactions with their environment rather than relying solely on pre-programmed instructions or explicit human guidance.
What is Reinforcement Learning in Robotics?
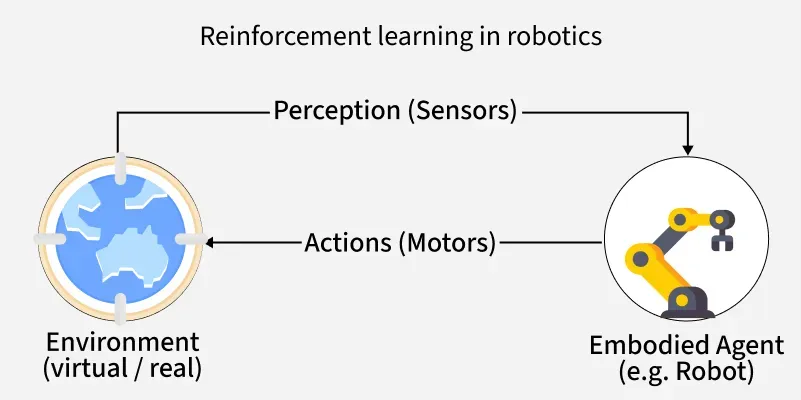
Reinforcement learning is a machine learning paradigm where an agent (robot) learns to make decisions by performing actions in an environment to maximize cumulative rewards. The robot receives feedback in the form of rewards or penalties, gradually discovering optimal behaviors for given tasks.
Trial-and-Error Learning: Robots learn by interacting with their environment, making RL suitable for tasks where explicit programming is difficult or the environment is uncertain.
Generalization: RL enables robots to adapt to new tasks and environments, improving autonomy and flexibility.
Human-like Learning: RL mimics the way humans learn from experience, making it particularly useful for developing sophisticated, adaptive robotic behaviors.
Types of RL Algorithms in Robotics
Value-based Methods:Such as Q-learning, where the robot learns the expected reward for taking specific actions in certain states.
Policy-based Methods: The robot directly learns a policy that maps states to actions.
Actor-Critic Methods: Combine value and policy-based approaches for improved learning efficiency.
Multi-agent RL: Multiple robots learn together, useful for swarm robotics and collaborative tasks.
Applications of RL in Robotics
RL has been successfully applied to a wide range of robotic platforms and tasks, including:
Manipulation and Grasping: Robots learn to pick and place objects, assemble parts, or manipulate tools.
Locomotion: Legged robots, wheeled robots and drones learn to walk, run, balance, or fly robustly in dynamic environments.
Autonomous Vehicles: RL is used for trajectory optimization, motion planning and control in self-driving cars and drones.
Industrial Automation: RL-based robots perform tasks in hazardous or high-precision environments, such as manufacturing, metal surface smoothing and assembly lines.
Swarm Robotics: Multiple robots coordinate using RL to achieve collective goals, such as exploration or object transport.
Human-Robot Interaction: RL enables robots to adapt to human preferences and learn from demonstrations or feedback.
Examples:
The OBELIX robot learned to push boxes using a value function-based RL approach.
The Zebra Zero robot arm mastered peg-in-hole insertion with policy gradients.
Carnegie Mellon’s autonomous helicopter learned robust flight control via model-based policy search.
The Sarcos humanoid robot acquired pole-balancing skills using forward models.
Challenges in RL for Robotics
Sample Efficiency: Physical robots have limited time and resources for learning; efficient algorithms are needed to minimize trial runs.
Safety: Trial-and-error can be risky for expensive or delicate hardware.
Reward Design: Crafting appropriate reward functions is crucial for successful learning.
Sim-to-Real Transfer: Policies learned in simulation may not always transfer perfectly to real-world robots due to differences in dynamics and perception.
Future Directions
Improved Algorithms: Research is ongoing to develop more sample-efficient, robust and safe RL algorithms for real-world robotics.
Human-Centered RL: Integrating human feedback and demonstrations to accelerate learning and improve safety.
Collaborative and Multi-Agent Systems: Expanding RL to teams of robots for complex, cooperative tasks.
Better Sim-to-Real Transfer: Bridging the gap between simulation and reality for reliable deployment.

{kind=link}
{kind=link}