The Reparameterization Trick is used in probabilistic models like Variational Autoencoders (VAEs) to make random sampling differentiable. Usually, sampling breaks gradient flow preventing learning through backpropagation.
This separates randomness from model parameters allowing smooth gradient updates and enabling deep learning models to train effectively with stochastic variables.
The Need for Reparameterization
Here are the main reasons why the reparameterization trick is needed:
Non Differentiable Sampling: Sampling from a probability distribution is non differentiable which blocks gradient flow.
Requirement in VAEs: Variational Autoencoders (VAEs) require sampling latent variables during training.
Problem Without Gradients: Without gradients, model parameters cannot be effectively updated.
Separation of Randomness and Parameters: The reparameterization trick separates randomness from learnable parameters.
Enables Differentiability: It makes stochastic models differentiable and compatible with backpropagation.
Efficient and Stable Training: Reparameterization allows efficient and stable training of probabilistic deep learning models.
Formula
The reparameterization trick allows sampling from a probability distribution in a way that is differentiable.
Instead of sampling z directly which is non differentiable, we rewrite it as:
μ : mean predicted by the encoder
σ : standard deviation predicted by the encoder
ϵ ∼ N (0, 1) : random noise drawn from a standard normal distribution
How the Reparameterization Trick Works
The Reparameterization Trick allows gradient based learning in models with stochastic sampling such as VAEs. Here’s how it works step by step:
1. Encoder Outputs Distribution Parameters
The model’s encoder predicts mean (μ) and standard deviation (σ) for the latent variables.
Instead of a single deterministic output, the latent space is probabilistic.
2. Introduce Random Noise
Sample a random variable ϵ from a standard normal distribution N(0,1).
This represents the stochastic part of the sampling.
3. Reparameterize the Latent Variable
Compute the latent vector as:
This separates learnable parameters ( μ, σ) from the randomness (ϵ).
4. Enable Differentiability
As μ and σ are outside the stochastic sampling, gradients can flow through them.
This allows backpropagation through the sampling process.
5. Use z for Decoding
The reparameterized z is fed into the decoder to reconstruct the input or generate outputs.
Training is now end to end differentiable.
Implementation
Step by step implementation of the Reparameterization Trick:
Step 1: Import PyTorch
Importing PyTorch provides tools for tensors, neural networks and automatic differentiation.
Step 2: Define the Encoder
Defining the encoder which is simple feedforward network that outputs mean and log variance for the latent variable.
Step 3: Forward Pass
Input x is transformed to produce μ and log_var, parameterizing a Gaussian distribution.
Step 4: Create Input and Encoder Instance
Generating a dummy input x and passes it through the encoder to get μ and log_var.
Step 5: Compute Standard Deviation
Converting log variance to standard deviation
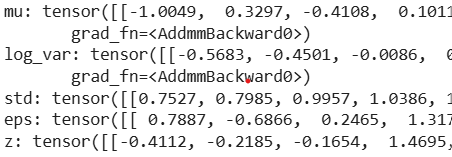
Step 6: Sample Noise and Apply Reparameterization
Sampling ε from standard normal.
Computing latent variable z as z = μ + σ. ϵ, making it differentiable.

{kind=link}
{kind=link}